
Convertizor static de frecventa pentru controlul turatiei motoarelor asincrone trifazate

Cu sistemul de comanda cu microprocesor si convertizor
static in tehnologie IGBT putem realiza optimizarea functionarii a o serie de
echipamente industriale, prin corelarea optima a regimului de lucru cu
consumurile energetice in flux continuu si cu posibilitatea integrarii in
eventuale sisteme de dispecerizare.
Aparatul contine o punte redresoare monofazata necomandata cu diode, un circuitul
intermediar de tensiune continua, circuit realizat cu condensatoare de filtrare
si temporizator de preincarcare, un invertor trifazat de tensiune in tehnologie
IGBT si un circuit cu microcontroller dedicat, preprogramat.
Realizarea echipamentului face posibila alimentarea unui motor asincron
trifazat, de la reteaua monofazata de alimentare cu energie electrica cu
facilitatea reglajului continuu al turatiei si acceleratiei. Un alt deziderat
este de a obtine un coeficient de utilizare maxim in conditiile unui consum
specific de energie minim.
Caracteristici functionale :
Comenzi de la distanta:
Semnalizari:
Echipamentul este protejat la aparitia accidentala a urmatoarelor situatii:
scurtcircuit
supratensiune in circ. intermediar
supratemperatura
La aparitia oricarei situatii de defect, invertorul se
blocheaza, impulsurile de comanda la tranzistoarele IGBT fiind blocate,
alimentarea motorului este intrerupta.
Introdus in echipamente de actionari industriale specifice, sistemul asigura :

Mai mult de jumatate din energia electrica produsa in tarile
cu industrie puternica, este consumanta de catre motoarele electrice, ponderea
cea mai mare avand-o motoarele asincrone, care castiga din ce in cel mai mult
teren in urma progreselor inregistrate in domeniul componentelor electronice de
putere specifice comutatiei statice precum si a sistemelor de comanda, ele
fiind tot mai frecvent echipate cu convertoare statice de frecventa, care fac
posibila varierea turatiei in limite relativ largi, prin reglarea simultana
atat a amplitudinii cat si a frecventei tensiunii de alimentare.
Este unanim recunoscut ca motorul asincron s-a impus prin simplitate
constructiva, robustete si randament, el fiind inca cel mai fiabil si cel mai
simplu din punct de vedere constructiv, faptul ca in majoritatea cazurilor nu
necesita practic nici un fel de intretinere constituind, de asemenea, un
avantaj important.
Dezvoltarea pe scara larga a convertoarelor statice de frecventa a permis
motorului asincron, utilizat anterior cu preponderenta in aplicatii de turatie
constanta, cu alimentare directa din retea, sa fie preferat in prezent si in
domeniile populate anterior in cea mai mare parte de catre motoare de curent
continuu (aplicatii care necesita turatii variabile).
Proiectarea de actionari electrice presupune si alegerea unui motor electric de
actionare ale carui caracteristici (turatie, moment de rotatie si plaja de
reglare) sunt stabilite in functie de cerintele proiectului. Din considerentele
mentionate mai sus, tipul de motor electric utilizat masiv in actionari
electrice pe plan mondial este motorul asincron trifazat. Constructia sa
robusta si simpla, gradul ridicat de protectie si tipodimensiunile
standardizate reprezinta caracteristicile remarcabile ale celui mai apreciat si
utilizat tip de electromotor.
De ce trifazat? Pentru ca motorul de inductie trifazat este singurul
tip la care campul magnetic invartitor este creat in mod natural in stator
datorita insasi naturii alimentarii (Toate motoarele electrice folosesc
campul magnetic invartitor pentru a pune in miscare rotorul).
Pentru crearea campului magnetic invartitor, celelalte tipuri de motoare fie ca
au nevoie de componente externe, cum este cazul motorului de inductie de curent
alternativ monofazat, fie ca folosesc comutatia electronica ori mecanica asa
cum e in cazul motoarelor de curent continuu.
Dintre motoarele de inductie trifazate, cel mai raspandit (peste 90%) este
tipul cu rotorul in scurtcircuit (rotor in colivie de veverita), pe stator
fiind plasata infasurarea trifazata care produce campul magnetic invartitor,
infasurarea rotorului fiind realizata din bare de aluminiu sau cupru scurtcircuitate
la capete de inele transversale.
Sensul de rotatie se inverseaza schimband sensul de rotatie al campului
magnetic invartitor, schimband doua faze intre ele.
Datele nominale electrice si mecanice ale motorului sunt tiparite pe eticheta
fixata pe acesta. Conexiunile electrice ale motoarelor asincrone trifazate se
fac , de regula, prin 6 borne. In acest mod se pot realiza doua moduri de
conectare, respectiv in stea si in triunghi.

In general aplicatiile performante cu motoare asincrone se compun din:
Desigur ca in urma progreselor inregistrate de electronica
de putere si a sistemelor de comanda numerica schemele au devenit tot mai
sofisticate, insa, in functie de natura aplicatiei, sunt posibile o serie de
simplificari.
De exemplu, in foarte multe cazuri, din considerente economice, redresorul nu
este comandat, ci clasic, cu diode, cu transfer unidirectional de energie.
Este si cazul aplicatiei de fata care propune o varianta
practica ultra low cost pentru controlul motoarelor asincrone trifazate,
abordabila si de catre cei cu mai putina experienta in controlul motoarelor,
axata in mare parte pe solutii hardware, avand in componenta si un circuit
specializat incluzand un microcontroller preprogramat.
Schema bloc este urmatoarea:
![]()

Solutia aleasa pentru partea de putere a invertorului PWM este bazata pe componente discrete, tranzistoare MOSFET sau IGBT, cu drivere separate pentru fiecare din cele 3 canale.
![]()


Conform schemei de mai sus, care este tipica pentru fiecare din cele 3 canale, se executa placile de circuit imprimat, circuitele fiind proiectate pe un singur layer petru a putea fi abordate si de catre cei cu dotare mai modesta. Configuratia cablajului e identica pentru cele 3 placi, dar numai una se implanteaza integral, de pe celelalte doua lipsind componentele U4, C6, C7, R9, R12, JP1, JP2 si J3, corespunzatoare circuitului de shut-down care e comun celor 3 canale. Proiectarea a avut in vedere o tensiune de lucru de peste 300V, tranzistoarele alegandu-se la 500-600V. curentii vehiculati corespund unei puteri a motorului de max 1KW, cat are in vedere prototipul.
![]()
PCB No.1 (Faza R) 
![]()
PCB No.2 (Faza S) 
![]()
PCB No.3 (Faza T) 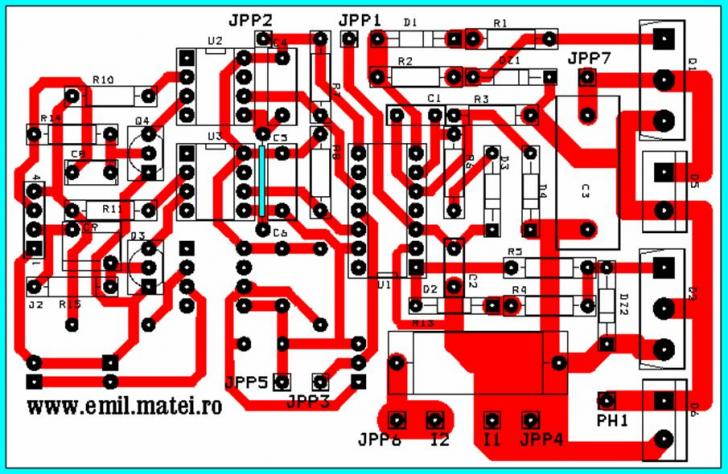
Alimentarea se face de la reteaua monofazata de curent
alternativ de 230V/50Hz. Tensiunea se redreseaza cu o punte redresoare corespunzatoare
si este apoi bine filtrata cu ajutorul unor condensatoare electrolitice de mare
capacitate, avand un ESR redus. Pe durata catorva secunde de la conectare,
curentul de incarcare al condensatoarelor electrolitice este limitat de catre o
rezistenta serie (R3), care apoi este suntata de contactele unui releu lucrand
ca timer de preincarcare.
Blocul redresor filtrat livreaza o tensiune de circa 320V. Un divizor rezistiv
format din rezistoarele R6-R10 costituie senzorul de tensiune care furnizeaza
microcontrollerului o fractiune din tensiunea continua de pe bara BUS+ a
redresorului de putere. Informatia de tensiune se obtine pe rezistorul R6,
fiind disponibila pe conectorul J5.
Rezistoarele R4 si R5 asigura descarcarea condensatoarelor la deconectare,
LED-ul inseriat cu acestea semnalizand prezenta tensiunii periculoase pana la
descarcarea completa a condensatoarelor de filtraj C4-C5.
Schema se prezinta mai jos, si se executa practic conform desen PCB No.4 -
Redresor filtrat, prezentat in continuare.
![]()
Schema de principiu - Redresor filtrat

![]()
PCB No.4 - Redresor filtrat 
![]()
Detalii executie PCB No.4 - Redresor filtrat 


Dupa executia si asamblarea celor 3 module care compun
etajele finale ale invertorului, precum si a modulului redresor filtrat, testat
in prealabil separat, se pot face primele teste cu sarcina la iesire. Pentru
inceput, se monteaza la iesire sarcini rezistive. Impulsurile se aplica la cele
6 intrari de semnal PWM.
Pentru evitarea deschiderii simultane a doua tranzistoare de pe acelasi brat,
montajul se completeaza cu un circuit de interblocare a semnalelor de comanda,
care asigura o protectie hardware eficienta. Circuitul de interblocare este
esential pe durata testelor in aceasta etapa, iar optional, poate fi inclus si
in varianta definitiva, ca o masura suplimentara de protectie, desi semnalul
furnizat de microcontroller asigura interblocarea mentionata prin software.
Un astfel de circuit este prezentat in cele ce urmeaza:
![]()

Circuitul e gandit ca un modul universal pentru montaje de
acest gen, asa ca a fost prevazut atat cu iesiri la care semnalele livrate sunt
in faza cu cele aplicate pe intrari, cat si cu semnale in antifaza. Semnalele
de intrare se aplica prin conectoarele J1-J2-J3, semnalele de iesire fiind
disponibile la conectoarele J4-J5-J6, respectiv J7-J8-J9.
Placa de circuit imprimat cu logica de interblocare a fost proiectata pe 2
layere:
![]()
PCB No.5 - Modul interblocare 
![]()
Detalii executie PCB No.5 - Modul interblocare 
Modulul microcontroller
Dezvoltarile relativ recente in
domeniul comenzii motoarelor asincrone au dus la crearea unui controller,
MC3PHAC, care are implementati algorimti de comanda a motoarelor asincrone.
Este o solutie ieftina si usor de implementat in diferite aplicatii.
Controllerul este preprogramat, dar utilizatorul il poate configura si programa
in functie de necesitatile si aplicatiile in care va fi folosit. O atentie
sporita a fost data sigurantei si diferitelor protectii.
La baza functionarii MC3PHAC sta un modul avansat PWM creat special pentru a
indeplini cele mai riguroase cerinte in comanda motoarelor asincrone. Ceasul
modulului este la 8MHz (125 ns intre 2 fronturi crescatoare ) si genereaza sase
semnale modulate in latime in grupuri de cate trei semnale complementare. Acest
lucru permite conectarea lui MC3PHAC direct la invertoare pentru cele trei
faze. Polaritatea partii inalte a semnalelor PWM poate fi specificata separat
de polaritatea partii joase. Timpul mort este introdus intre timpul de pornire
a perechii de semnale complementare si poate fi setat pentru orice valoare
cuprinsa intre 0 si 32 microsecunde, cu pasul de 125 ns.
Frecventa PWM poate avea una din valorile de mai jos, cu rezolutia aferenta.
Tensiunea de intrare ( MUX_IN ) [V] --- Frecventa PWM [KHz] --- Rezolutia PWM
[biti]
0 - 1 V --------- 5,291 KHz ---- 9,6 biti
1,5 - 2,25 V --- 10,5821 KHz --- 8,6 biti
2,75 - 3,5 V --- 15,873 KHz --- 8 biti
4 - 5 V --------- 21,164 KHz --- 7,6 biti
MC3PHAC este diponibil, printre altele, si in capsula PDIP cu 28 de pini,
versiune in care a fost utilizat in prezenta aplicatie.
MC3PHAC poate functiona in unul din doua moduri: independent sau integrat
(host). Selectia modului de operare are loc la pornire si este specificata de
starea pinului 20.

Descriere succinta a fiecarui pin: (Nr pinului - Numele pinului - Descriere
1 - VREF ADC VREF High - intrarea tensiunii de referinta pentru placa ADC.
Pentru un semnal cat mai bun acest pin trebuie legat la VDDA.
2 - RESET "0" pe acest pin reseteaza MC3PHAC. Toate iesirile PWM sunt setate pe
inalta impedanta. Acest pin este unul bidirectional ce permite resetarea
intregului sistem. Se muta in "0" atunci cand este detectat un reset in sistem
(ex. pierderea ceasului).
3 - VDDA VDD (Analogic) - alimenteaza portiunile analogice ale MC3PHAC, care
includ si circuitul de generare al semnalului de tact (PLL) si ADC.
4 - VSSA VSS (Analogic) - alimentarea (masa) portiunilor analogice ale MC3PHAC,
care includ si circuitul de generare al semnalului de tact (PLL) si ADC.
5 - OSC2 Osc Out - iesirea oscilatorului cu cristalul de cuart (a circuitului
de ceas). Corectitudinea ceasului este data de oscilatorul de 4 MHz.
6 - OSC1 Osc In - intrarea oscilatorului cu cristalul de cuart (a circuitului
de ceas). Poate accepta si un semnal extern. Corectitudinea ceasului este data
de oscilatorul de 4 MHz.
7 - PLLCAP PLL Damp - un condensator legat de la acest pin la masa afecteaza
stabilitatea si timpul de reactie al circuitului de ceas PLL. Valori mari dau o
stabilitate mai buna. O valoare tipica este de 0.1 microFarad.
8 - PWMPOL_BASEFREQ PWM Pol/Base Speed - intrare specifica initializarii care
determina polaritatea PWM si viteza de baza (50 sau 60 Hz)
9 - PWM_U_TOP PWM U Top - semnalul de iesire PWM pentru comanda tranzistorului
de sus pentru faza U
10 - PWM_U_BOT PWM U Bottom - semnalul de iesire PWM pentru comanda
tranzistorului de jos pentru faza U
11 - PWM_V_TOP PWM V Top - semnalul de iesire PWM pentru comanda tranzistorului
de sus pentru faza V
12 - PWM_V_BOT PWM V Bottom - semnalul de iesire PWM pentru comanda
tranzistorului de jos pentru faza V
13 - PWM_W_TOP PWM W Top - semnalul de iesire PWM pentru comanda tranzistorului
de sus pentru faza W
14 - PWM_W_BOT PWM W Bottom - semnalul de iesire PWM pentru comanda
tranzistorului de jos pentru faza W
15 - FAULTIN Fault In - "1" pe aceasta intrare dezactiveaza imediat iesirile
PWM. Cand pinul va trece in starea "0" se va reincerca activarea.
16 - PWMFREQ_RxD PWM Freq/Rx Data - in modul independent acest pin este o
iesire care trece in "0" pentru a indica faptul ca pinul MUX_IN citeste o
tensiune analogica pentru a determina o frecventa PWM dorita. In modul integrat
(host) acest pin este o intrare ce primeste date serial (SCI).
17 - RETRY_Tx Retry Time/Tx Data - in modul independent acest pin este o iesire
care trece in "0" pentru a indica faptul ca pinul MUX_IN citeste o tensiune
analogica pentru a specifica un timp de pauza dupa o eroare inainte de a
reactiva iesirile PWM. In modul integrat acest pin este o intrare ce primeste
date serial.
18 - RBRAKE R Brake - acest pin este o iesire care trece in starea "1" de
fiecare data cand tensiunea de alimentare depaseste o valoare prestabilita.
Acest semnal se doreste sa conecteze un rezistor in paralel pe capacitatea de
filtraj a alimentarii pentru a preveni cresterea tensiunii.
19 - DT_FAULTOUT Dead-Time/Fault Out - in modul independent acest pin este este
o iesire care trece in "0" pentru a indica faptul ca pinul MUX_IN citeste o
tensiune analogica pentru a specifica timpul mort intre starile de pornire ale
semnalelor PWM de sus si jos pentru o faza data. In modul integrat este un pin
care trece in "0" de fiecare data cand apare o eroare.
20 - VBOOST_MODE Vboost/Mode Select - la pornire daca acest pin se afla in
starea "1" rezulta modul independent de functionare, daca "0" - modul integrat.
In modul independent este folosit si ca o iesire care daca trece in starea "0"
indica faptul ca pinul MUX_IN detecteaza o tensiune analogica ce specifica
valoare tensiunii de boost a motorului.
21 - VDD +5 V alimentare pentru MC3PHAC
22 - VSS masa pt alimentarea de +5 V pentru MC3PHAC
23 - FWD Forward/Reverse - acest pin este o intrare care stabileste in ce sens
se va roti motorul.
24 - START Start/Stop - acest pin este o intrare care stabileste daca motorul
se roteste sau nu.
25 - MUX_IN Mux In - In modul independent, in timpul initializarii, este un pin
care determina polaritatea PWM si viteza de baza. Altfel, este o intrare
analogica ce citeste anumite nivele de tensiune corespunzatoare parametrilor
sistemului MC3PHAC.
26 - SPEED Speed In - In modul independent, in timpul initializarii, este un
pin care determina polaritatea PWM si viteza de baza. Altfel, este o intrare
analogica ce citeste nivelul tensiunii corespunzator vitezei motorului.
27 - ACCEL Acceleration In - In modul independent, in timpul initializarii,
este un pin care determina polaritatea PWM si viteza de baza. Altfel, este o
intrare analogica ce citeste nivelul tensiunii corespunzator acceleratiei
motorului.
28 - DC_BUS Dc Bus In - In modul independent, in timpul initializarii, este un
pin care determina polaritatea PWM si viteza de baza. Altfel, este o intrare
analogica ce citeste nivelul de tensiune proportional cu tensiunea de
alimentare.
Modul de lucru independent
Daca pinul VBOOST_MODE este in
starea "1" cand MC3PHAC este pornit, sau dupa ce este resetat, MC3PHAC trece in
modul independent. In acest mod functionalitatea unor pini se schimba in sensul
ca dispozitivul poate controla un motor fara sa astepte informatii de la o
componenta externa (PC). Controllerul va comanda diferiti pini chiar in timp ce
monitorizeaza starea altora.
In multe cazuri, parametrul care trebuie specificat este reprezentat de o
tensiune analogica data pe pinul MUX_IN in timp ce alti pini sunt in starea
"0". In acest fel MC3PHAC se poate conecta la un mux analogic care va comuta
semnalele de la intrarea MUX_IN, atunci cand semnalul selectat va trece in
starea "0".
Toate semnalele trebuie sa fie cuprinse in intervalul 0 V si valoarea maxima
ADCVREF. Ca o alternativa economica, poate fi conectata o retea pasiva pentru
fiecare parametru de iesire si intrarea MUX_IN ca in figura de mai jos.
Impedanta echivalenta a acestei retele pasive, vazuta de pinul MUX_IN este
foarte importanta si va trebui sa se afle in intervalul ( 5-10 ) kiloohmi. Daca
rezistenta este prea mare, cresterea curentului prin pinii de intrare/iesire va
cauza o tensiune de offset care va afecta citirea corecta a starilor.
Pinul de intrare START este intotdeauna urmarit. Intrarea este sensibila, dar
pinul trebuie sa fie in starea "1" inainte ca "0" sa fie recunoscut ca un
semnal de start. Aceasta este o masura de prevenire a pornirii accidentale a
motorului in cazul in care MC3PHAC este alimentat iar comutatorul este in
pozitia de start.
Sistemul de monitorizare si protectie
Din moment ce MC3PHAC este folosit pentru controlul invertoarelor de putere care lucreaza cu tensiuni si curenti mari, are implementat un sistem de monitorizare si protectie. Uneori, cand o problema este detectata MC3PHAC raspunde imediat incercand sa restabilizeze situatia. In alte cazuri, sistemul PWM este imediat oprit pana cand problema in cauza este rezolvata. Pentru doua din erorile ce ar putea aparea (VDD mica si semnalul de ceas pierdut), controllerul se va restarta ducand PWM in starea de inalta impedanta si fortand in acest fel resetarea ansamblului hardware extern conectat la pinul de reset. Fiecare protectie este detaliata pe larg in cele ce urmeaza:
![]()
Scheme modul microcontroller 

![]()

![]()
Montajul de test - prototip
CONVERTOR STATIC DE FRECVENTA - HOME MADE - PENTRU MOTOR
ASINCRON TRIFAZAT

![]()

![]()

![]()

![]()

![]()

![]()

![]()

![]()

![]()

![]()

![]()
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |