
Masini de curent continuu speciale
Functiile ce trebuie indeplinite de masinile de c.c. speciale determina parti-cularitatile in constructia si caracteristicilor lor. Doua grupe mari de masini de c.c. din sistemele de comanda automata (de informatie si de executie) sunt prezentate aici: tahogeneratoare si motoare de executie, inclusiv cele de momente mari.
1. Tahogeneratoare
Tahogeneratoarele (THG) sunt generatoare de
c.c., care servesc transforma-rii semnalului mecanic de intrare in
semnal electric. Semnalul de intrare
este tura-tia n a arborelui
respectiv viteza unghiulara ![]() La iesirile infasurarii
indusu-lui se masoara semnalul electric de iesire
La iesirile infasurarii
indusu-lui se masoara semnalul electric de iesire ![]() , care
poate fi folosit pentru comanda echipamentelor din sistemele automate sau
serveste numai ca indicator al turatiei de rotire. Cerintele
impuse unui tahogenerator sunt:
, care
poate fi folosit pentru comanda echipamentelor din sistemele automate sau
serveste numai ca indicator al turatiei de rotire. Cerintele
impuse unui tahogenerator sunt:
de a avea caracteristica liniara
de iesire 
erori minime in transformarea
semnalelor inclusiv a valorilor mici ale pulsatiilor tensiunii de
iesire ![]()
moment rezistent mic in regimurile tranzitorii si stationare;
masa si volum mici.
Aceste cerinte de baza se
realizeaza mai simplu, daca THG este cu excitatie
independenta cand inductorul este realizat cu magneti
permanenti. Din caracteris-tica externa a generatoarelor cu excitatie independenta se observa
ca variatia ![]() a tensiunii de iesire de la
functionarea in gol pana la sarcina nominala, este mica. In
consecința,
a tensiunii de iesire de la
functionarea in gol pana la sarcina nominala, este mica. In
consecința, ![]() ramane apropiata de aceea de la mers in gol, la variatia curentu-lui
Ia al indusului,
respectiv a curentului de sarcina la inregistrator sau la
echipa-mentul de comanda, conectat la iesirea tahogeneratorului.
ramane apropiata de aceea de la mers in gol, la variatia curentu-lui
Ia al indusului,
respectiv a curentului de sarcina la inregistrator sau la
echipa-mentul de comanda, conectat la iesirea tahogeneratorului.
La functionarea cu magneti
permanenti in inductor nu este necesara sursa de alimentare a
infasurarii de excitatie. Nu sunt necesare nici masuri
complexe de compensare a fluxului de excitatie dupa incalzirea
infasurarii de excitatie. Cerinta referitoare la
moment minim de inertie se indeplineste prin utilizarea de
constructii rotorice usoare si lungi. Caracteristica de iesire a tahogeneratorului se
determina din dependenta ![]() si ecuatia de echilibru a tensiunii
infasurarii indu-sului:
si ecuatia de echilibru a tensiunii
infasurarii indu-sului:
![]()
sau
 (4.22)
(4.22)
unde:
![]() -rezistența
indusului ce include si
rezistenta la periile de contact, iar
-rezistența
indusului ce include si
rezistenta la periile de contact, iar  .
.
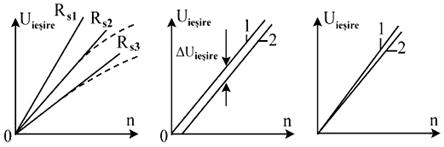
Dependentele ![]() pentru diferite rezistente de
sarcina Rs sunt date
in fig.4.52 a, unde
pentru diferite rezistente de
sarcina Rs sunt date
in fig.4.52 a, unde ![]() si
si ![]() . Din
figura se observa ca, cu reducerea lui RS se reduce si valoarea lui Uiesire la una si aceeasi turatie. Datorita acesteia, este
recomandat a se lucra cu inregistratoare sau cu echipamente comandate cu
rezistenta proprie ridicata.
. Din
figura se observa ca, cu reducerea lui RS se reduce si valoarea lui Uiesire la una si aceeasi turatie. Datorita acesteia, este
recomandat a se lucra cu inregistratoare sau cu echipamente comandate cu
rezistenta proprie ridicata.
a b c
Fig.4.52 Dependentele Uiesire=f(n) pentru diferite rezistente de sarcina Rs, referitoare la tahogeneratorul de c.c.(a); b) zona de insensibilitate a THG;
c) zona de insensibilitate a THG cand periile sunt deplasate din a.n.g.
Erorile tahogeneratorului
 (4.22.a)
(4.22.a)
Relatia (4.22.a) reprezinta
amplitudinea erorii THG, cand pentru turatie n determinata, diferenta ![]() se calculeaza din valoarea
se calculeaza din valoarea ![]() pentru
pentru ![]() .
. ![]() este valoarea efectiva a tensiunii de
iesire, cand
este valoarea efectiva a tensiunii de
iesire, cand ![]() si se manifesta efectul
re-actiei indusului.
si se manifesta efectul
re-actiei indusului.
Abaterea in ![]() se obtine si datorita
caracterului neliniar al rezistentei tranzitorii de contact a periilor. In
fig. 4.52b este indicata zona de
insensibilitate a THG fața de dreapta 2, ce este determinata de
caderea de tensiune la perii
se obtine si datorita
caracterului neliniar al rezistentei tranzitorii de contact a periilor. In
fig. 4.52b este indicata zona de
insensibilitate a THG fața de dreapta 2, ce este determinata de
caderea de tensiune la perii ![]()
La THG se manifesta si erori
datorate asimetriei, cand ![]() are valori diferi-te pentru turatii
identice in sensurile de rotatie direct si invers (curbele 1 si
2). Ea se obtine cand periile sunt deplasate din a.n.g. si este
determinata de actiunea reac-tiei indusului. (fig.4.52 c). Amplitudinea erorii este in limitele
are valori diferi-te pentru turatii
identice in sensurile de rotatie direct si invers (curbele 1 si
2). Ea se obtine cand periile sunt deplasate din a.n.g. si este
determinata de actiunea reac-tiei indusului. (fig.4.52 c). Amplitudinea erorii este in limitele
 , iar a asimetriei
, iar a asimetriei ![]() . Erorile
de la
. Erorile
de la ![]()
![]() sunt determinate si de pulsati-ile
din dintii de pe suprafata indusului, de anizotropia magnetica,
de elipticitatea rotorului s.a.
sunt determinate si de pulsati-ile
din dintii de pe suprafata indusului, de anizotropia magnetica,
de elipticitatea rotorului s.a.
Un parametru important al THG este panta S a caracteristicii de iesire. Ea se determina de coeficientul unghiular al caracteristicii liniare de iesire pentru curent de sarcina exprimat la turatia nominala de lucru.
Obisnuit pe tablita THG se da valoarea ![]() la 1000 rot/min sau alta viteza
recomandata. Pentru THG de c.c. inclinarea S este in limitele
la 1000 rot/min sau alta viteza
recomandata. Pentru THG de c.c. inclinarea S este in limitele ![]() .
.
2. Motoare de executie
Motoarele de executie transforma semnale electrice de rotatie (tensiune de alimentare) in semnal mecanic de iesire (deplasarea mecanica sau rotatie a arborelui).
Cerintele de baza ale acestora sunt:
limite largi de reglare a turatiei;
dependente liniare dintre parametrii de baza care determina caracte-risticile lor: U, n si M;
valoare nula a functiei de iesire la semnal de intrare nul;
prelucrare rapida a semnalului de intrare;
volum si masa mici.
Cerintele pentru accelerare introduc modificari in constructia motoarelor speciale de executie. Momentul de inertie se reduce daca se utilizeaza rotoare usoa-re fara circuit feromagnetic in doua variante de baza. Prima varianta este cu rotor gol si lung, a carui infasurare este obisnuit turnata in rasina epoxidica.
Cilindrul gol obtinut impreuna cu legaturile mecanice cu colectorul sau se roteste intre statoarele feromagnetice exterior si interior intocmai ca la masina asincrona cu rotorul nemagnetic gol. Inductorul, daca este cu magneti permanenti, poate fi plasat in statorul interior (fig.4.53 a unde 1- carcasa; 2 - infasurarea roto-rului, 3 - ansamblu colector - perii, 4 - inductorul).
Fig. Variante constructive ale motoarelor de executie: a) cu rotor lung si gol;
b) cu armatura rotorica disc; c), d) constructii rotorice pentru doua utilizari tipice.
A doua constructie este cu armatura rotorica disc. In acest caz infasurarea este realizata cu material conductor plasata pe baza nemagnetica (textolit, ceramica s.a.) dupa o tehnologie de executie cu lamele imprimate, inclusiv a colectorului.
Partile
active ale sectiilor sunt dispuse
deasupra celor doua parti ale discului si se
conecteaza prin orificii metalizate. De obicei, aceste motoare sunt cu
multi poli ![]() distribuiti pe circumferita
statorului (fig.4.53 b, unde
notatiile au semnificatiile din fig.4.53 a). In fig.4.53 c si
fig.4.53 d sunt indicate cele
doua variante constructive rotorice tipice. Schemele de conexiune ale
motorului de executie sunt indicate in fig.4.54.
distribuiti pe circumferita
statorului (fig.4.53 b, unde
notatiile au semnificatiile din fig.4.53 a). In fig.4.53 c si
fig.4.53 d sunt indicate cele
doua variante constructive rotorice tipice. Schemele de conexiune ale
motorului de executie sunt indicate in fig.4.54.
c c
a b
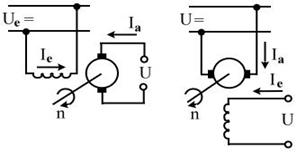
Fig.4.54 Modalitati de comanda a motoarelor de executie:
a) comanda prin indus; b) comanda prin excitatie.
La comanda prin indus, semnalul electric de intrare Uc se aplica la iesirile infasurarii indusului (fig.4.54 a), iar la cea polara - la iesirile infasurarii de excitatie. Si aici, ca si la motoarele asincrone de executie se lucreaza cu valorile relative ale parametrilor:
 ;
;  ;
; 
unde:
![]() , n si M - sunt valorile variabile ale tensiunii de
comanda, turatiei si momentului;
, n si M - sunt valorile variabile ale tensiunii de
comanda, turatiei si momentului;
![]() - turatia la functionarea in gol;
- turatia la functionarea in gol;
![]() - momentul de pornire la motorul imobil;
- momentul de pornire la motorul imobil;
![]() - valoarea nominala a tensiunii de
comanda.
- valoarea nominala a tensiunii de
comanda.
Daca se substituie expresiile (4.23) in dependentele caracteristicilor mecani-ce si de reglare in regimul de motor, se obtin ecuatiile pentru aceste caracteristici in unitati relative.
Comanda prin indus
caracteristica mecanica: ![]()
caracteristica de reglare: ![]() (4.24)
(4.24)
Comanda prin inductor
caracteristica mecanica: ![]()
caracteristica de reglare: ![]() (4.25)
(4.25)
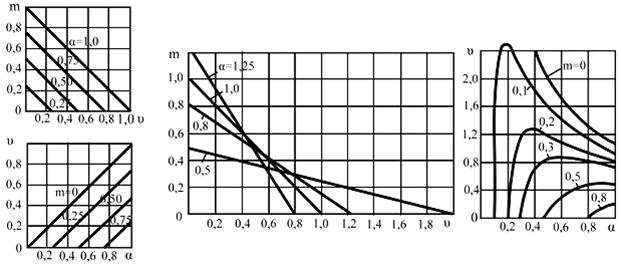
Forma grafica a caracteristicilor in unitati relative este data in fig.4.55 a pen-tru comanda prin rotor indus si in fig.4.55 b pentru comanda polara (prin excitatie).
a b
Fig.4.55 Forma grafica a caracteristicilor in unitati relative:
a) pentru comanda prin rotor; b) comanda prin excitatie
Rezultatele indica faptul ca prin comanda rotorica se obtin caracteristici li-niare cu acelasi coeficient unghiular. La comanda polara (prin excitatie), ele sunt sau liniare cu inclinare diferita, sau dependente neliniare.
Datorita acestor si altor avantaje suplimentare in exploatare, in practica se folosesc mult motoarele de executie cu excitatia prin magneti permanenti si co-manda prin rotor. Se executa si motoare de executie in a caror carcasa pe arborele comun este montat si tahogeneratorul.
3. Motoare cu momente ridicate
Motoarele cu momente inalte au
ordinul de marime al momentului de por-nire fata de cel nominal
in limitele ![]() .
Accelerarea rotorului se obtine prin adoptarea schemei potrivite de
comanda a semnalului de intrare. In acest sens, la pornire se aplica
valoare ridicata a tensiunii de alimentare, respectiv a curentului rotoric
si creste valoarea cuplului de pornire Mp fata de valoarea nominala Mn. Acest proces, precum
si procesul de franare rapida a rotorului dupa intreruperea
semnalului electric de comanda, se asigura din schema de comanda
a unui singur motor.
.
Accelerarea rotorului se obtine prin adoptarea schemei potrivite de
comanda a semnalului de intrare. In acest sens, la pornire se aplica
valoare ridicata a tensiunii de alimentare, respectiv a curentului rotoric
si creste valoarea cuplului de pornire Mp fata de valoarea nominala Mn. Acest proces, precum
si procesul de franare rapida a rotorului dupa intreruperea
semnalului electric de comanda, se asigura din schema de comanda
a unui singur motor.
In fig.4.56 a se prezinta un astfel de motor cu blocul de comanda a lui. O parte dintre acestea sunt in complet cu tahogeneratorul, indeplinind legatura inversa in sistemul automat. Dependentele M(n) pentru regimurile de pornire, oprire si functionare normala sunt expuse in fig. 4.56 b.
Regim Regim Regim
de pornire, franare
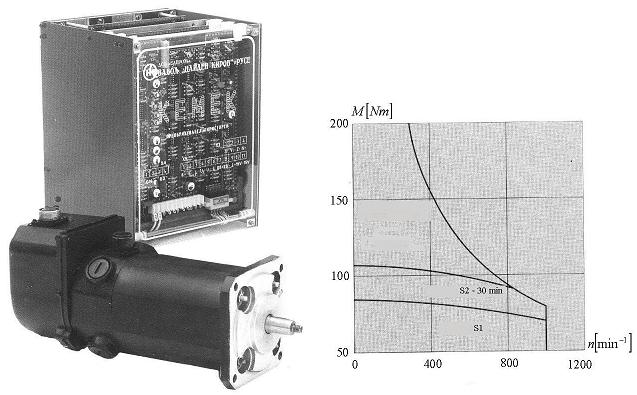
Fig.4.56 a) Motor cu moment ridicat si blocul lui de comanda; b) dependentele M=f(n) pentru regimurile de pornire, oprire si functionare (S1, S2 - 30 min).
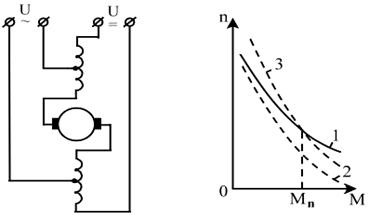
Motorul universal cu colector
Aceasta masina electrica este un motor cu colector, care poate fi alimentat atat de la o sursa de c.c., cat si de la o sursa monofazata de c.a. Impreuna cu acest avantaj, el este foarte util si in activitatea sociala cat si in industrie datorita posibi-litatilor de obtinere de viteze mari ale rotorului - pana la 30.000 rot/min. Motorul universal cu colector de puteri mici este utilizat la instrumente electrice portabile si la alte masini de turatii mari. Motoarele de acest gen de puteri mari (sute de kW) au capatat aplicatie ca masini electrice de tractiune. Constructia de principiu a mo-torului universal cu colector este prezentata in fig. 4.57 a.
a b
Fig.4.57 a) Constructia de principiu a motorului universal cu colector; b)dependentele n=f(M).
Ea nu se deosebeste esential de constructia motorului de c.c. Particularitatile motorului universal cu colector sunt urmatoarele:
circuitul magnetic al inductorului ca si al rotorului este realizat din tole de otel electrotehnic datorita fluxului alternativ la alimentare de la sursa de c.a.;
motorul universal cu colector este motor cu excitatie serie. Motoarele cu excitatie paralel nu sunt oportune pentru utilizarea larga datorita schemelor complicate de comanda a lor;
infasurarea de excitatie are numere diferite de spire pentru functiona-rea la alimentarea in c.c. si c.a. cu scopul nivelarii limitelor vitezei de lucru in cele doua cazuri. Din acest motiv infasurarea, obisnuit se divide in sectii cu conexiuni la bornele de iesire;
la alimentarea in c.a. motorul are comutatie inrautatita.
Caracteristicile mecanice ale motorului universal cu colector sunt date in fig. 4.57 b. Curba 1 este dependenta n(M) la alimentare in c.c., 2 este dependenta obtinuta la alimentarea in c.a. a intregii infasurari de excitatie, iar curba 3 este caracteristica mecanica pentru numar redus de spire al inductorului, deci pentru valoare redusa a fluxului de excitatie. Acest fenomen se poate dovedi prin ecuatia de echilibru a tensiunilor motorului:
![]() (4.26)
(4.26)
unde:
![]() - suma rezistentelor
infasurarii indusului si a infasurarii de
excitatie serie;
- suma rezistentelor
infasurarii indusului si a infasurarii de
excitatie serie;
![]() - suma
reactantelor acelorasi infasurari.
- suma
reactantelor acelorasi infasurari.
Din relatia (4.26) in care se substituie
![]() pentru curent alternativ, pentru n(Ia) si de acolo si
n(M) se obtine:
pentru curent alternativ, pentru n(Ia) si de acolo si
n(M) se obtine:
unde la numarator apare termenul suplimentar in c.a. ![]() . Actiunea
lui se manifesta mai important la turatii mici (n respectiv
. Actiunea
lui se manifesta mai important la turatii mici (n respectiv ![]() ) .
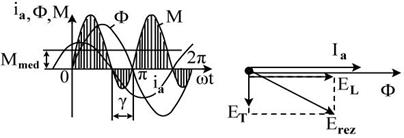
Dependenta momentului M de
) .
Dependenta momentului M de ![]() la alimentare in c.a. se observa in fig.
4.58 a in care se prezinta
si dependentele curentului ia,
fluxului de excitatie
la alimentare in c.a. se observa in fig.
4.58 a in care se prezinta
si dependentele curentului ia,
fluxului de excitatie ![]() si momentului M in functie de
si momentului M in functie de ![]() Unghiul
Unghiul
![]() este relativ mic si se determina din
pierderile in sistemul magnetic la alimentare in c.a., unde
este relativ mic si se determina din
pierderile in sistemul magnetic la alimentare in c.a., unde ![]() , iar
, iar ![]() . Prin
substitutia acestor valori in expresia cuplului
. Prin
substitutia acestor valori in expresia cuplului ![]() se poate demon-stra ca momentul M este
pulsatoriu, dar are si valori negative. Valoarea lui medie este suficient
de mare, ca momentul de inertie sa invinga actiunea de
franare din zonele cu M negativ si rotorul sa se roteasca cu
turatie constanta.
se poate demon-stra ca momentul M este
pulsatoriu, dar are si valori negative. Valoarea lui medie este suficient
de mare, ca momentul de inertie sa invinga actiunea de
franare din zonele cu M negativ si rotorul sa se roteasca cu
turatie constanta.
a b
Fig.4.58 Dependentele ia, Φe, M=f(ωt) ale motorului universal
cu colector la alimentare in c.a.; b) compunerea fazorilor eL si eT.
Comutatia dificila la alimentarea in c.a. in comparatie cu aceea la alimentarea in c.c. se obtine datorita cresterii valorii totale a t.e.m. reactive din sectia in comutatie. La eL, care este determinata de curentul alternativ de comutatie ia, se adauga si t.e.m. de transformare eT, indusa in sectia in comutatie de fluxul de excitatie alternativ.
Daca se admite ![]() ,
t.e.m. rezultanta erez
este determinata de suma fazorilor eL si eT (fig. 4.58.b).
Masurile indicate in cap.4 compenseaza t.e.m. eL, dar nu si eT, in special in regimurile
de pornire. De aceea la motoarele de putere pentru tracti-une, pe
langa polii auxiliari se foloseste si infasurarea de
compensare, daca frec-venta tensiunii de alimentare este redusa
- 16 ⅔ si 25 Hz.
,
t.e.m. rezultanta erez
este determinata de suma fazorilor eL si eT (fig. 4.58.b).
Masurile indicate in cap.4 compenseaza t.e.m. eL, dar nu si eT, in special in regimurile
de pornire. De aceea la motoarele de putere pentru tracti-une, pe
langa polii auxiliari se foloseste si infasurarea de
compensare, daca frec-venta tensiunii de alimentare este redusa
- 16 ⅔ si 25 Hz.
Pe langa motoarele universale cu colector, in practica sunt cunoscute, dar de mica utilizare si alte tipuri de masini de c.a. cu colector: motoare monofazate cu repulsie, cu colectoare trifazate cu excitatie paralela si doua completuri de perii s.a. Ele sunt caracterizate de posibilitatea de reglare a turatiei si se examineaza in literatura de specialitate a masinilor electrice.
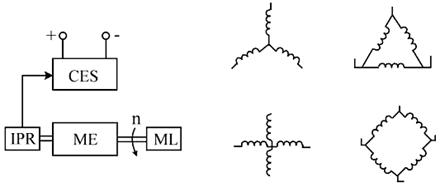
5 Motor de c.c. fara perii (fara colector, fara contacte)
Scopul realizarii motoarelor de c.c. fara perii consta in pastrarea posibilitati-lor de reglare usoara a turatiei in limite largi deoarece se evita deficientele din exploatare, legate de ansamblul colector - perii, necesar asigurarii trecerii curentu-lui prin sectii, cand ele trec din zona de actiune a unui pol in aceea a altui pol.
In acest moment se modifica
sensul de miscare al conductoarelor fata de fluxul magnetic. Cu
schimbarea si a sensului curentului se mentine sensul de
acti-une al fortelor asupra conductoarelor din campul magnetic. Acesta
asigura acelasi sens cuplului electromagnetic de rotatie.
Fortele electromagnetice Fem
si momentul electromagnetic ![]() se determina cu relatiile:
se determina cu relatiile:
![]() ;
; ![]()
Forta maxima, respectiv
momentul electromagnetic maxim se obtine pentru unghiul ![]() dintre fluxul inductorului si fluxul de
reactie a indusului.
dintre fluxul inductorului si fluxul de
reactie a indusului.
La motorul cu colector aceasta legatura de pozitie se realizeaza de ansam-blul colectorului si periilor. La motoarele fara perii aceasta functie se realizeaza de un echipament fara contacte. El alimenteaza sectiile inseriate ale infasurarii indusu-lui astfel incat unghiul α sa fie apropiat de 90o.
a b
Fig.4.59 a) Schema de principiu a sistemului electromecanic cu motor de c.c. fara colector;
b) forme de baza ale infasurarilor statorului: deschise si inchise.
In fig.4.59 este prezentata schema de principiu a sistemului electromecanic cu motor de c.c. fara colector, in care ME este masina electrica ce antreneaza masina de lucru ML. Alimentarea infasurarii masinii electrice de la sursa de c.c. se realizeaza prin comutatorul cu elemente semiconductoare (CES), iar semnalul pentru pozitia rotorului se obtine de la indicatorul de pozitie al rotorului (IPR).
Masina electrica ME
Constructia ei este analoaga celei a masinii sincrone cu magneti permanenti. In stator este plasata infasurarea ce contine cateva sectii (faze). Cel mai adesea, constructiile realizate pana in prezent sunt cu doua, trei sau patru sectii plasate in crestaturile circuitului magnetic din tole de otel electrotehnic sau pe polii aparenti.
In fig.4.59 sunt prezentate doua forme de baza ale infasurarilor: deschise sau inchise. Excitatia motorului se realizeaza de magnetii permanenti din rotor. Numa-rul polilor, obisnuit este doi sau patru. Materialele utilizate sunt cu forta coercitiva mare - aliaje magnetice dure de tipul alnico (cunial), ferite si aliaje din metale rare.
Raspandire larga au obtinut constructiile cu magneti permanenti din ferite dure. Magnetii din metale rare au valoare mare a fortei coercitive si inductie rema-nenta ridicata (mai mult de doua ori mai inalta decat aceea a feritelor). Acesti indi-catori permit a se realiza motoare cu inductoare cu magneti din metale rare cu mo-ment in jur de 1,5 ori mai mare, putere de iesire de 2 ori mai mare, constante de timp de 2 ori respectiv 1,7 ori mai mici (mecanica si electrica) in comparatie cu cele ale inductoarelor din ferite.
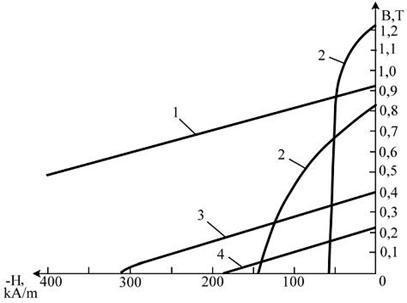
Proprietatile magnetice ale materialelor utilizate pentru magnetii permanenti se pot compara prin curbele de magnetizare, indicate in fig.4.60 a pentru trei grupe tipice de materiale. Aliajele AlNiCO (aliaje cu fier, aluminiu, nichel, cobalt s.a. adaugate in proportii diferite) sunt reprezentate de curba 2. Curba 1 se refera la magneti din metale rare (aliaje cu samariu si cobalt sau neodiu, fier si bor). Curbele 3 si 4 reprezinta magneti permanenti din ferite (ceramice transformate din oxizi de fier si strontiu-curba 3; fier si bariu - curba 4).
a
Fig.4.60 a Curbele de magnetizare pentru trei grupe tipice de materiale utilizate pentru magnetii permanenti: curba 1 pentru magneti din metale pe baza de pamanturi rare;
curba 2 pentru aliaje AlNiCO. Curbele 3 si 4 pentru magneti permanenti din ferite.
In fig.4.60 b este prezentata o comparatie demonstrativa a dimensiunilor magnetilor permanenti din diferite materiale, care excita acelasi camp magnetic pentru aceleasi marimi ale intrefierului. (0,1 T la 5 mm).
Dezavantajul magnetilor permanenti din aliaje cu metale magnetice dure este necesitatea de a se lua masuri impotriva demagnetizarii datorita campului magnetic al curentului indus (reactia curentului din indus). Se aplica urmatoarele masuri de baza impotriva acestui proces:
limitarea la maxim a valorii minime a curentului indus;
montarea pieselor polare din materialul magnetic moale (compact sau stantat) ca fluxul magnetic datorat curentului indus sa se inchida in principal prin ele.
b
Fig.4.60 b Comparatie intre diferiti magneti permanenti din diferite materiale
ce excita acelasi camp magnetic pentru aceleasi marimi ale intrefierului.
Indicatorul de pozitie al rotorului (IPR)
Ca indicatori de pozitie a rotorului se utilizeaza convertoare optice (foto electrice), inductive s.a. Raspandita este aplicatia IPR cu elemente Hol (Hall) si cu transformatoare rotative (rezolvere).
Comutatorul electronic cu semiconductoare (CES)
Prin intermediul comutatorului electronic cu semiconductoare se realizeaza alimentarea si comanda motorului fara contacte, precum si reglarea turatiei. Reali-zarea se face cu utilizarea tranzistoarelor sau tiristorilor.
IPR asigura legatura
necesara intre pozitia fluxului magnetic al inductorului (rotorului)
si fazorul t.m.m. a infasurarii statorice. Aceasta se poate
obtine prin alimentarea in serie a fazelor infasurarii
statorice de la CES in functie de unghiul de rotire al rotorului. La motorul fara perii
cu numar mic de faze nu este posibil ca in perioada unei rotatii
sa se pastreze ![]() Aproximativ, el este apropiat de 900 pe timpul perioadei dintre
comutatii si depinde de procedeul comenzii la alimen-tare.
Aproximativ, el este apropiat de 900 pe timpul perioadei dintre
comutatii si depinde de procedeul comenzii la alimen-tare.
Principiul de functionare
Cel mai adesea, principiul de
functionare se explica prin intermediul con-structiei utilizate,
in care rotorul este bipolar, iar infasurarea statorului (indusului)
este deschisa si consta din trei sectii. Sectiile sunt
conectate in stea cu punct comun de iesire scos afara. Blocul de
comanda a alimentarii schemei de la sursa de tensiune continua
este simbolizat prin CES. El se comanda de la indicatorul de pozitie al rotorului. IPR
este compus din trei senzori dispusi la 1200, care realizeaza succesiv contactul cu sectorul
de unghi ![]() ,
rotativ simultan cu inductorul.
,
rotativ simultan cu inductorul.
In fig.4.61 a este indicat momentul initial al functionarii
motorului. Pozitia sectorului corespunde starii inductorului in care
t.m.m. a lui Fe si
t.m.m. a indusului Fa
sunt decalate in spatiu cu unghiul ![]() . In
acest caz sectorul ce asigura legatura intre contactele 0 si 1
si IPR alimenteaza numai sectia 1. Dupa rotirea
inductorului cu unghiul
. In
acest caz sectorul ce asigura legatura intre contactele 0 si 1
si IPR alimenteaza numai sectia 1. Dupa rotirea
inductorului cu unghiul ![]() fata de starea initiala,
sectorul conecteaza la iesirile 1-0-2 la CES. El asigura tensiunea de alimentare, la
infasurarile 1 si 2
cand unghiul
fata de starea initiala,
sectorul conecteaza la iesirile 1-0-2 la CES. El asigura tensiunea de alimentare, la
infasurarile 1 si 2
cand unghiul ![]() (fig4.61 b
(fig4.61 b
In figurile urmatoare (4.61 c, d,
e) sunt date variatiile
unghiului α pentru
pozitiile urmatoare ale rotorului rotit cu unghiuri multiple de 300. Diagrama referi-toare la
curentii ce trec prin sectiile 1, 2, 3 este prezentata in fig.
4.61 e. Ele sunt impulsuri unipolare
si corespund functionarii IPR cu unghiul ![]() si schema comutatorului electronic
semiconductor, utilizeaza spre exemplu trei tranzistore.
si schema comutatorului electronic
semiconductor, utilizeaza spre exemplu trei tranzistore.
Din fig. 4.61 se vede ca la
aceasta constructie a motorului fara contacte, unghiul ![]() variaza de la 600 la 1200.
Aceasta inseamna ca momentul obtinut are valoare variabila
si contine o componenta alternativa.
variaza de la 600 la 1200.
Aceasta inseamna ca momentul obtinut are valoare variabila
si contine o componenta alternativa.
o
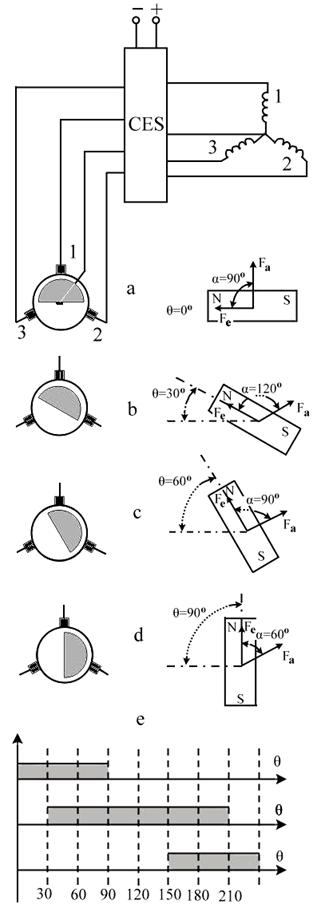
Fig.4.61 a) momentul initial de functionare al motorului; b) alimentarea infasurarilor 1 si 2 cand α=1200; c,d) variatiile unghiului α pentru urmatoarele pozitii ale rotorului, multiple de 300
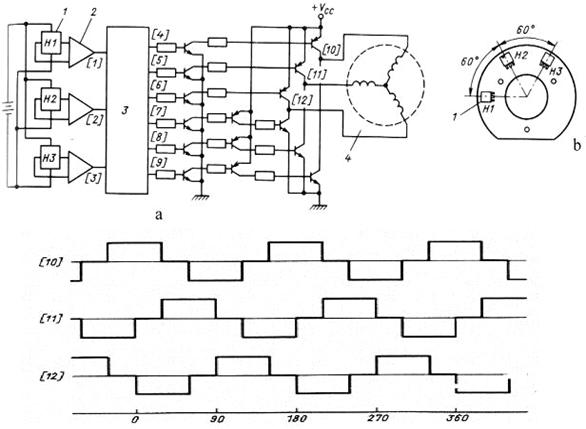
Fig.4.62 a) Schema instalatiei motorului utilizat in comanda tiparirii cu laser;
b) Diagramele curntilor ce trec prin cele trei infasurari cu punctele de intrare 10,11,12
Modificarea sensului de rotatie
a rotorului se poate obtine cu scheme supli-mentare de solutionare.
Prin schimbari in CES (exemplu schema cu sase tranzisto-re), se poate
obtine variatia bipolara a curentilor prin sectii.
In functie de forma infasurarilor inchise sau deschise
si de schema surselor comandate se folosesc si diferite IPR-sectoare cu unghiul ![]() sau alt tip de senzori. Cei mai
utili-zati sunt senzorii Hol (Hall), adesea implementati in
scheme integrate, prin care se
obtin semnale prelucrate.
sau alt tip de senzori. Cei mai
utili-zati sunt senzorii Hol (Hall), adesea implementati in
scheme integrate, prin care se
obtin semnale prelucrate.
Randamentul inalt al motorului se obtine cu infasurarea trisectionata, analoa-ga motoarelor trifazate de c.a. Acest gen de motor este folosit in comanda instala-tiilor de tiparire cu laser - fig.4.62. In schema semnalelor, pozitia rotorului se obti-ne de la trei convertoare Hol - H1, H2, H3 notate cu 1. Amplificatoarele de semnale de la senzorii Hol sunt notate cu 2, iar cu 3 este notata schema ce genereaza semna-lele la tranzistoarele ce comanda infasurarile statorice ale motorului. Blocul motorului si infasurarile lui statorice sunt notate cu 4.
Sub schema de principiu sunt date diagramele curentilor din cele trei infasurari cu punctele de intrare 10, 11, 12. Ele stabilesc t.m.m., analog celor de la infasurarile trifazate statorice. Efectul obtinut consta in reducerea pulsatiilor mo-mentului electromagnetic. Prin utilizarea infasurarii indusului cu patru sectii se complica schema de comanda a alimentarii.
In multe cazuri practice sunt necesare motoare cu constructie simpla si nu in special cu comanda complicata fara cerinte severe asupra pulsatiilor momentului (exemplu la ventilatoare). Atunci se utilizeaza infasurari cu una si doua sectii (mo-nofazate si bifazate).
In fig.4.63 sunt prezentate constructia statorului si rotorului si scheme de principiu ale motorului fara perii pentru ventilator. Constructia este cu rotor exte-rior din magnetii permanenti 1. In statorul 2 pe circuitul magnetic si pe polii cu piese polare se plaseaza sectiile infasurarii 3 a indusului (fig.4.63 a). IPR este ele-ment Hall cu patru iesiri (doua de alimentare si doua pentru inregistrarea t.e.m. ob-tinute).
Schema poate fi integrata cu amplificator cu trei iesiri. Se plaseaza pe linia, perpendiculara pe axa polilor statorici si functioneaza la trecerea capatului senzo-rului peste magnetii permanenti cand genereaza tensiuni de sensuri opuse la Hall la schimbarea polaritatii magnetului permanent (fig.4.63 b).
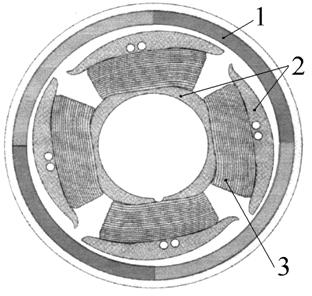
Fig.4.63 a) Constructia statorului si motorului fara perii, pentru ventilator.
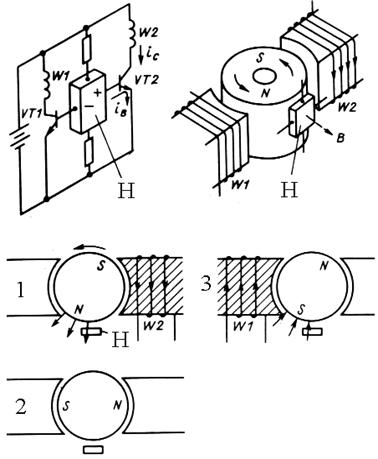
Fig.4.63 b) Schema integrata cu amplificator inglobat cu trei iesiri pentru motorul fara contacte.
Schemele 1 si 2 din fig.4.63 c creaza campul magnetic pulsatoriu al infasurarii indusului, care prin interactiune cu magnetul permanent determina aparitia momentului pulsatoriu. Aceasta se poate explica prin fig.4.63 b, unde sunt prezentate doua sectii w1 si w2, magnetul permanent din rotor si elementul Hol (1) plasat in axa neutra dintre poli.
Comanda tranzistoarelor din schema de alimentare se face prin tensiunea de iesire de la elementul Hol cand sunt aratate trei pozitii ale rotorului si alimentarii w1 si w2, determinata de IPR. Cand fluxurile magnetice ale infasurarilor si magne-tului permanent sunt defazate cu unghiul α>0, valoarea momentului se modifica in functie de α (pozitiile 1 si 3).
Daca ![]() (pozitia 2), momentul este nul. In
pozitia 2, tensiunea de iesire de la IPR este nula si
infasurarile w1
si w2 nu se alimenteaza. Rotorul continua
a se roti si trece prin puncte moarte ale liniei neutrale datorita
momentului de inertie.
(pozitia 2), momentul este nul. In
pozitia 2, tensiunea de iesire de la IPR este nula si
infasurarile w1
si w2 nu se alimenteaza. Rotorul continua
a se roti si trece prin puncte moarte ale liniei neutrale datorita
momentului de inertie.
De aceea la moment rezistent ridicat datorita frecarii, rotorul se poate frana sau nu se poate realiza pornirea motorului, daca rotorul este blocat in acea pozitie 2 (in punctul mort). Acest neajuns se inlatura prin masuri speciale.
Una dintre acestea este prezentata in fig.4.63 a-piesele polare ale infasurarii indusului, sunt cu intrefier variabil fata de magnetul permanent. Cand inductorul este in rotor, polii pot fi ca in fig.4.63 d.
In acest caz apare momentul reactiv, care pentru pozitia 2 tinde sa roteasca rotorul in pozitia determinata de reluctanta cea mai mica a caii fluxului creat de magnetul permanent. Aceasta actiune fixeaza sfarsitul respectiv inceputul pozitiei rotorului dupa eliminarea alimentarii infasurarilor.
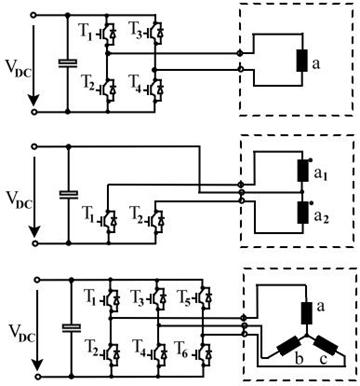
Fig.4.63 c) Scheme pentru crearea campului magnetic pulsatoriu
al infasurarii indusului motorului fara contacte.
Atunci cand prin infasurarile
w1 si w2 trece curent, dependentele
momentului electromagnetic ce actioneaza asupra rotorului sunt
curbele 1 si ![]() din fig.4.63 d. Punctele moarte ale acestui moment
sunt semnalate de 3. Analog, momentului reactiv de la masinile sincrone,
la decuplarea infasurarii de excitatie rotorul motorului
este scos din pozitia fixa de
actiunea momentului 2 si se va roti in pozitia stabila
(punctele 4).
din fig.4.63 d. Punctele moarte ale acestui moment
sunt semnalate de 3. Analog, momentului reactiv de la masinile sincrone,
la decuplarea infasurarii de excitatie rotorul motorului
este scos din pozitia fixa de
actiunea momentului 2 si se va roti in pozitia stabila
(punctele 4).
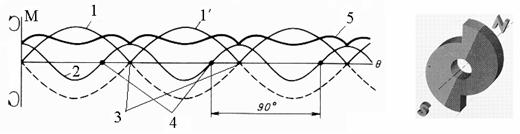
Fig.4.63 d) Dependentele (curbele 1,1´) ale momentului electromagnetic ce actioneaza asupra rotorului la trecerea curentului prin infasurarile w1, w2.
Dupa alimentarea infasurarii de excitatie, comandata de IPR, rotorul se ro-teste datorita momentului electromagnetic rezultant 5. Acest moment este fara va-lori nule la modificarea unghiului de rotatie al rotorului.
In fig.4.63.c , pentru comparatie este prezentata si examinata in fig.4.61 a infasurarea trisectionata (trifazata). Cu schema de comanda mai complicata a IPR se poate imbunatati dependenta momentului de θ cand forma curentilor ce trec prin sectii, se apropie de o sinusoida.
Utilizarea motoarelor fara perii se extinde in toate domeniile industriale si casnice. Numarul mare al acestor motoare cu diferite scheme si constructii se folo-seste in tehnica de calcul,in echipamentele de memorare si tiparire s.a., precum si in schemele de automatizare, ca motoare de executie.
Se extinde utilizarea motoarelor fara perii si in mijloacele de transport la instalatii auxiliare (servo-comanda hidraulica), dar si ca motoare de tractiune, ex. in automobile electrice mici, golfcare s.a.
|
Politica de confidentialitate |
| Copyright ©
2026 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |