Masini sincrone speciale
1. Generatoare si motoare cu magneti permanenti
Principiul de functionare al masinilor sincrone cu magneti permanenti nu se deosebeste de cel al masinilor cu excitatie electromagnetica prin infasurare de curent continuu. Exista avantaje in exploatare datorita faptului ca nu este necesara sursa de c.c. pentru alimentarea inductorului. Aceasta simplifica si constructia masinilor sincrone si inlatura legatura prin contact alunecator.
Dezavantajul lor consta in puterea
limitata a masinilor sincrone datorita capacitatilor
(resurselor) energetice mai mici ale magnetilor permanenti. Ele se
pot amplifica prin utilizarea unor metale pe baza de pamanturi rare,
de exemplu ![]() care ridica
pretul echipamentului. Nu exista posibilitatea de reglare a
excitatiei.
care ridica
pretul echipamentului. Nu exista posibilitatea de reglare a
excitatiei.
In fig.5.32 se prezinta tipuri de rotoare pentru GS:
a) rotor sub forma de stea;
b) rotor cu dispunere radiala a magnetilor cu piesele polare;
c) rotor cu poli sub forma de gheara.
Rotorul stea este piesa turnata din aliaje magnetice dure: alni, alnico, cunife (sau nial, conial s.a.). Ele sunt compuse din Fe, Ni, Al, Co, Cu. Aceste materiale sunt fragile si au rezistenta mecanica mica.
Alte forme de magneti permanenti utilizati in masinile sincrone se obtin prin metodele metalurgiei pulberilor prin presarea pulberilor feromagnetice si constitui-te in materiale. Exemple de astfel de magneti sunt magnetii din oxizi magnetici de bariu si strontiu.
Pentru a doua forma de rotoare (b) este caracteristic aceea ca polii magne-tilor permanenti au piesele polare din material magnetic moale, in care obisnuit se plaseaza infasurarea de amortizare in scurtcircuit. Aceste piese polare ecraneaza magnetii permanenti de actiunea reactiei indusului, iar in spatiile libere se toarna aluminiu.
Prin intermediul constructiei rotorului
cu poli sub forma de ghiara se creste
numarul polilor GS, incat forma distributiei inductiei ![]() se apropie de forma
sinusoidala. In locul magnetilor permanenti din rotor se poate
plasa infasurarea concentrata de excitatie. Aceasta
constructie a rotorului (c) este caracteristica pentru automobile,
mijloace de transport s.a. GS pentru mijloace de transport.
se apropie de forma
sinusoidala. In locul magnetilor permanenti din rotor se poate
plasa infasurarea concentrata de excitatie. Aceasta
constructie a rotorului (c) este caracteristica pentru automobile,
mijloace de transport s.a. GS pentru mijloace de transport.
GS nu sunt larg aplicate ca tahogeneratoare
datorita neliniaritatii mari a caracteristicilor lor de
iesire. Daca se utilizeaza dependenta frecventei
tensiunii de iesire a indusului de viteza unghiulara ![]() a rotorului, se pot
folosi pentru masura turatiei. Frecventa urmatoare de
rotatie se determina ca numar de frecvente ale impulsurilor
de iesire in unitatea de timp prin frecventmetru.
a rotorului, se pot
folosi pentru masura turatiei. Frecventa urmatoare de
rotatie se determina ca numar de frecvente ale impulsurilor
de iesire in unitatea de timp prin frecventmetru.
Generatoare
Fig.5.32 Tipuri de rotoare ale GS: a) rotor de forma in stea; b) rotor cu dispunerea radiala a magnetilor cu piesele polare; c) rotor cu poli sub forma de gheara.
Motoare
Motoarele sincrone cu magneti permanenti au avantaje si dezavantaje analoage cu cele prezentate mai sus la GS.
a) b) c)
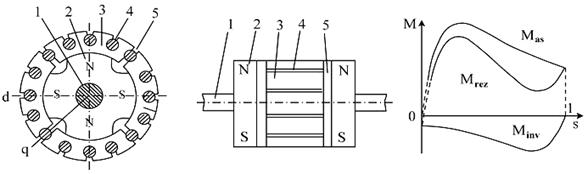
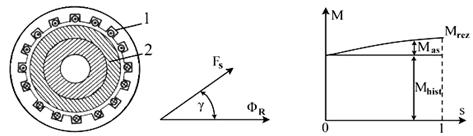
Fig.5.33 Constructii de baza ale rotorului motorului sincron:
a) cu dispozitie radiala a magnetilor permanenti;
b) cu dispozitie axiala a magnetilor permanenti; c) dependenta M=f(s) pentru acest caz.
In fig.5.33 sunt prezentate doua constructii de baza ale rotoarelor motoarelor sincrone: cu dispozitie radiala (a) si axiala (b) a magnetilor permanenti. In circuitul feromagnetic din tole al rotorului este plasata infasurarea de pornire scurtcircuitata. Sunt utilizate urmatoarele notatii: 1 - arbore; 2 - magnet permanent; 3 - rotor pachet rotoric; 4 - infasurare in scurtcircuit; 5 - bara nemagnetica.
Particularitatea in procesul de pornire al
motoarelor sincrone cu magneti permanenti in comparatie cu cele
excitate electromagnetic este aceea ca la rotire in infasurarea
statorica datorita actiunii magnetilor permanenti se
induce t.e.m. proportionala cu ![]() Aceasta t.e.m.
determina trecerea curentului prin infasurarea statorica cu
frecventa
Aceasta t.e.m.
determina trecerea curentului prin infasurarea statorica cu
frecventa![]() si se creaza momentul rezistent
si se creaza momentul rezistent ![]() Caracteristica
mecanica rezultanta in rotatie are cadere (sea) in
apropiere de
Caracteristica
mecanica rezultanta in rotatie are cadere (sea) in
apropiere de ![]() a carei
existenta trebuie considerata la pornirea motoarelor sincrone cu
magneti permanenti.
a carei
existenta trebuie considerata la pornirea motoarelor sincrone cu
magneti permanenti.
In figura, curba ![]() este momentul
asincron, creat de curentii din infasura-rea de pornire in
scurtcircuit si campul invartitor al infasurarii statorice,
este momentul
asincron, creat de curentii din infasura-rea de pornire in
scurtcircuit si campul invartitor al infasurarii statorice,
![]() este momentul
rezistent (invers) de actiune inversa, iar
este momentul
rezistent (invers) de actiune inversa, iar ![]() este momentul
rezultant activ. Intrarea in sincronism are loc la alunecari de ordinul
catorva procente si depinde de momentul sincronizarii si de
raportul dintre momentele de sarcina si de inertie la arborele
masinii (fig.5.33 c). La
depasirea unghiului
este momentul
rezultant activ. Intrarea in sincronism are loc la alunecari de ordinul
catorva procente si depinde de momentul sincronizarii si de
raportul dintre momentele de sarcina si de inertie la arborele
masinii (fig.5.33 c). La
depasirea unghiului ![]() de functionare
stabila, motorul sincron iese din sincronism.
de functionare
stabila, motorul sincron iese din sincronism.
2. Motoare sincrone reactive si cu histerezis
Statoarele acestor motoare sunt bifazate sau trifazate cu executie obisnuita ca la masina sincrona. Rotoarele au constructie care difera de cele examinate pana aici. Aceste diferente in principiul constructiei determina si principiile lor de functionare. Si a doua forma de motoare are constructii simple fara legaturi prin contacte alunecatoare si siguranta in exploatare.
Motorul reactiv
Constructia lui de principiu se
observa din structura primara a echipamen-telor electromecanice cu
partea mobila in rotatie din fig.5.34. Rotorul motorului reactiv este
cu poli aparenti, fara infasurare de excitatie
si magneti permanenti. Se noteaza cu: 1 - pachetele
feromagnetice care formeaza polii; 2 - infasurari de
pornire in scurtcircuit (in varianta c, 2 este piesa turnata din
aluminiu). Datorita reluctanței diferite a fluxului magnetic, polii
rotorului se orienteaza dupa axa campului magnetic statoric
datorita actiunii fortelor tangentiale ![]() Aceste forte
creaza momentul care roteste rotorul pana in pozitia de
minima reluctanța pe drumul fluxului magnetic al
infasurarii statorice, flux ce se roteste in spatiu cu
viteza sincrona. Momentul masinii neexcitate, care roteste
rotorul, este determinat de a doua componenta a expresiei (5.30):
Aceste forte
creaza momentul care roteste rotorul pana in pozitia de
minima reluctanța pe drumul fluxului magnetic al
infasurarii statorice, flux ce se roteste in spatiu cu
viteza sincrona. Momentul masinii neexcitate, care roteste
rotorul, este determinat de a doua componenta a expresiei (5.30):
 (5.31)
(5.31)
Unghiul ![]() depinde de sarcina
motorului reactiv deoarece la momentul de sarcina
depinde de sarcina
motorului reactiv deoarece la momentul de sarcina ![]() si
si ![]()
a) b) c)
Fig.5.34 Motorul reactiv: a) principiu constructiv si functional; b) pachetul de tole rotorice este perpendicular pe arbore; c) pachet de tole rotorice paralel cu arborele.
Executii practice ale rotorului se prezinta in fig.5.34 b si c unde sunt prezentate constructii cu pachetul 1 din tole de otel electrotehnic perpendiculare pe arbore (b) sau pachetele 1 din tole de otel electrotehnic paralele cu arborele (c).
Cu 2 este notata infasurarea
in scurtcircuit care poate fi executata cu bare profilate sau prin lipirea
cavitatilor dintre pachetele de aluminiu. Motoarele reacti-ve au ![]() si
si ![]() relativ mici, dar sunt
simple ca constructie si au siguranta in exploatare.
relativ mici, dar sunt
simple ca constructie si au siguranta in exploatare.
Motorul cu histerezis
Constructia de principiu a motorului cu histerezis este indicata in fig.5.35 a. Statorul 1 nu are particularitati constructive. Rotorul 2 se executa din materiale magnetice special selectate, cu pierderi de histerezis ridicate sau se compune din doua parti. Prima parte a rotorului este realizata din material magnetic dur, iar a doua parte din material magnetic moale sau nemagnetic.
Momentul de rotatie al motorului cu
histerezis se bazeaza pe diferenta principala in utilizarea
materialelor magnetice dure pentru magnetii permanenti de
excitatie cu rezistenta la magnetizare si acelor pentru
motoarele cu histerezis. In cel de al doilea caz se lucreaza cu materiale
magnetice dure cu ciclu larg de histerezis, care se magnetizeaza
datorita actiunii campului magnetic statoric si determina
rotirea rotorului prin intermediul lui![]()
Momentul de histerezis se creaza
datorita fortelor tangentiale dintre polii statorici si rotorici.
Directiile celor doua campuri sunt defazate cu unghiul ![]() El depinde de forma
materialului si de constructia rotorului (compact sau din tole).
Daca se neglijeaza pierderile datorate curentilor turbionari,
pierderile de baza in procesul de magnetizare ciclica vor fi
pierderile prin histerezis.
El depinde de forma
materialului si de constructia rotorului (compact sau din tole).
Daca se neglijeaza pierderile datorate curentilor turbionari,
pierderile de baza in procesul de magnetizare ciclica vor fi
pierderile prin histerezis.
a) b) c)
Fig.5.35 a) Constructia de principiu a motorului cu histerezis;
b) unghiul γ<![]() (
(![]() ; ΦR); c) dependeta M=f(s);
; ΦR); c) dependeta M=f(s);
In fig.5.35 b este prezentat unghiul spatial ![]() dintre t.m.m.
dintre t.m.m. ![]() determinata de
curentul statoric I si fluxul rotorului
determinata de
curentul statoric I si fluxul rotorului ![]() Unghiul
Unghiul ![]() este proportional
cu pierderile la magnetizare ciclica, care depind de latimea
ciclului de histerezis. Pentru materialele utilizate si constructii
realizate,
este proportional
cu pierderile la magnetizare ciclica, care depind de latimea
ciclului de histerezis. Pentru materialele utilizate si constructii
realizate, ![]() este in limitele
aproximative
este in limitele
aproximative ![]() Rotirea rotorului se
datoreaza cuplului de histerezis
Rotirea rotorului se
datoreaza cuplului de histerezis ![]() cand frecventa de magnetizare ciclica se
determina de catre s,
cand frecventa de magnetizare ciclica se
determina de catre s, ![]() .
.
Unghiul de sarcina ![]() trebuie sa fie
mai mic decat
trebuie sa fie
mai mic decat ![]() In caz contrar rotorul
iese din sincronism si functioneaza ca asincron. Atunci cuplului
In caz contrar rotorul
iese din sincronism si functioneaza ca asincron. Atunci cuplului
![]() i se adauga
si
i se adauga
si ![]() , care se obtine datorita curentilor
turbionari din stratul de histerezis compact. Momentul suplimentar
, care se obtine datorita curentilor
turbionari din stratul de histerezis compact. Momentul suplimentar ![]() se obtine si
daca bucsa interioara este din material compact nemagnetic sau
magnetic.
se obtine si
daca bucsa interioara este din material compact nemagnetic sau
magnetic.
In fig.5.35 c este indicata caracteristica mecanica. Momentul
rezultant ![]() este suma dintre
momentul de histerezis
este suma dintre
momentul de histerezis ![]() si momentul
asincron
si momentul
asincron ![]()
Motoarele cu histerezis sunt motoare electrice fara contacte cu constructie simpla, sigure in pornire si exploatare. Ca dezavantaje se retin indicatorii energetici scazuti.
3. Masini inductoare
Generatoare inductoare
Generatoarele inductoare sunt GS speciale
destinate obtinerii de curent alternativ cu frecventa
ridicata pana la cativa zeci de kHz, in timp ce puterea lor
ajunge pana la sute de kW. Se utilizeaza in statii de radiolocatii,
transport la viteza ridicata, in instalatii electro-termice
s.a. Constructia GS inductoare se diferentiaza
substantial de aceea a GS traditionale. La acestea nu se poate
obtine cresterea frecventei tensiunii de iesire, care
rezulta din dependenta ![]() Aceasta rezulta
din imposibilitatea cresterii turatiei
Aceasta rezulta
din imposibilitatea cresterii turatiei ![]() datorita
limitarilor impuse de puterea mecanica necesara. Nu este admis a
se creste
datorita
limitarilor impuse de puterea mecanica necesara. Nu este admis a
se creste ![]() prin cresterea
numarului de poli datorita limitarii in distributia lor. In
fig.5.36 a este prezentata una
dintre constructiile GS de inductie. Infasurarile de
excitatie 1 si a indusului 2 se dispun in stator. Rotoarele 3 la
toate variantele GS inductoare sunt fara infasurari
si au numar mare de dinti pe circumferinta lor. Se
executa din tole de otel electrotehnic.
prin cresterea
numarului de poli datorita limitarii in distributia lor. In
fig.5.36 a este prezentata una
dintre constructiile GS de inductie. Infasurarile de
excitatie 1 si a indusului 2 se dispun in stator. Rotoarele 3 la
toate variantele GS inductoare sunt fara infasurari
si au numar mare de dinti pe circumferinta lor. Se
executa din tole de otel electrotehnic.
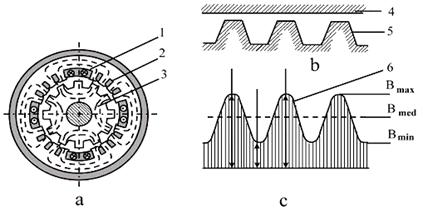
Fig.5.36 O varianta constructiva a GS inductor (a); b) statorul si rotorul pentru GS inductor;
c) variatia Bδ pe lungimea intrefierului
Datorita dintilor rotorului, reluctanta
intrefierului are componenta variabila. Aceasta determina
si pulsatii in curba distributiei ![]() Daca 4 (fig.5.36 b) este sta-torul, iar 5 - rotorul, 6
reprezinta variatia lui
Daca 4 (fig.5.36 b) este sta-torul, iar 5 - rotorul, 6
reprezinta variatia lui ![]() pe lungimea
intrefierului. Aceasta contine doua componente: constanta -
pe lungimea
intrefierului. Aceasta contine doua componente: constanta - ![]() si variabila
care prezinta pulsatii de la
si variabila
care prezinta pulsatii de la ![]() (in fata
crestaturii) pana la
(in fata
crestaturii) pana la ![]() (in fata
dintelui). Campul magnetic constant este imobil, iar cel variabil se
roteste cu turatia, determinata de modificarea pozitiei
dintilor rotorici. Acest camp induce in infasurarea indusului
t.e.m. cu frecventa
(in fata
dintelui). Campul magnetic constant este imobil, iar cel variabil se
roteste cu turatia, determinata de modificarea pozitiei
dintilor rotorici. Acest camp induce in infasurarea indusului
t.e.m. cu frecventa ![]() , unde
, unde ![]() este numarul de
dinti ai rotorului iar n - turatia rotorului.
este numarul de
dinti ai rotorului iar n - turatia rotorului.
Pe langa constructia prezentata cu excitatie radiala exista si aceea cu excita-tie axiala. La generatoarele de frecventa ridicata (peste 3000 Hz) se practica si danturarea circuitului magnetic statoric.
GS inductoare sunt sigure in exploatare
datorita absentei infasurarilor in rotor si
legaturii prin contact, dar au ![]() mai coborat decat
acelea cu constructie traditionala.
mai coborat decat
acelea cu constructie traditionala.
Motoare reductoare
Constructiile sunt analoage GS
inductoare ce se folosesc si ca motoare. La motoarele sincrone de acest
gen, este complexa problema obtinerii turatiilor mici la arborele de iesire  . Aceasta este esentiala la motoarele de mica
putere (pana la 100 W) in mecanismele automatizate unde este necesara
o turatie stabila si strict determinata. Motoarele
reductoare pot fi cu excitatie electro-magnetica, cu magneti
permanenti sau cel mai adesea - fara excitatie (reactive).
In fig.5.37 a este prezentata
schema motorului reductor reactiv, unde 1 este statorul cu
infasurarea de c.a. 2 si rotorul dintat 3 fara
infasurari.
. Aceasta este esentiala la motoarele de mica
putere (pana la 100 W) in mecanismele automatizate unde este necesara
o turatie stabila si strict determinata. Motoarele
reductoare pot fi cu excitatie electro-magnetica, cu magneti
permanenti sau cel mai adesea - fara excitatie (reactive).
In fig.5.37 a este prezentata
schema motorului reductor reactiv, unde 1 este statorul cu
infasurarea de c.a. 2 si rotorul dintat 3 fara
infasurari.
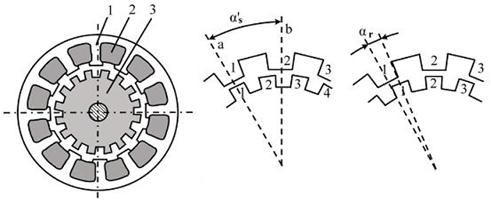
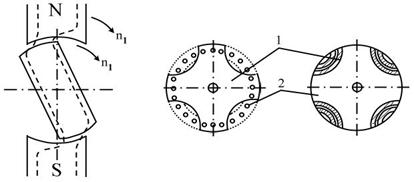
a) b)
Fig.5.37 a) Motorul reactiv reductor(schema); b)principiul de functionare al acestui tip de motor.
Infasurarea statorului este
plasata in ![]() crestaturi, iar
cea rotorului in
crestaturi, iar
cea rotorului in ![]() crestaturi.
Obisnuit
crestaturi.
Obisnuit ![]() Principiul de
functionare al motorului reactiv reduc-tor se poate explica prin fig.5.37 b. El se bazeaza pe momentul
reactiv, care roteste dintii rotorici (cel mai adesea in doua
sensuri opuse) pana la pozitia simetrica fata de
dintii statorici opusi. Spre exemplu, in momentul initial, unul
in fata celuilalt sunt dintii 1 ai statorului si rotorului.
Dupa rotirea fazorului fluxului magnetic sta-toric cu unghiul
Principiul de
functionare al motorului reactiv reduc-tor se poate explica prin fig.5.37 b. El se bazeaza pe momentul
reactiv, care roteste dintii rotorici (cel mai adesea in doua
sensuri opuse) pana la pozitia simetrica fata de
dintii statorici opusi. Spre exemplu, in momentul initial, unul
in fata celuilalt sunt dintii 1 ai statorului si rotorului.
Dupa rotirea fazorului fluxului magnetic sta-toric cu unghiul  momentul reactiv
roteste rotorul pana in noua pozitie 2-2, la care reluctanta
pe drumul fluxului este minima - la unghiul
momentul reactiv
roteste rotorul pana in noua pozitie 2-2, la care reluctanta
pe drumul fluxului este minima - la unghiul ![]()
Din figura se vede ca unghiul ![]() este mult mai mic
decat
este mult mai mic
decat ![]() Unghiul
Unghiul ![]() si frecventa
de rotatie a rotorului sunt:
si frecventa
de rotatie a rotorului sunt:
 (5.32)
(5.32)
Din relatiile obtinute se poate
stabili ca la motorul cu ![]()
![]()
![]() rezulta ca
rezulta ca ![]() adica
adica ![]() si
si ![]() Daca
Daca ![]()
![]()
![]()
![]()
Dezavantajele acestor motoare sunt: moment de
rotatie mic, ![]() mic -
mic - ![]() Avantajele lor: simplitatea
si siguranta constructiei si viteza de iesire
mica fara utilizarea transmisiei mecanice.
Avantajele lor: simplitatea
si siguranta constructiei si viteza de iesire
mica fara utilizarea transmisiei mecanice.
4. Masina sincrona, asincronizata
La functionarea in paralel a
masinii sincrone cu reteaua electrica se obtin regimuri, in
care la cresterea unghiului ![]() rotorul incepe a se
roti cu turatia
rotorul incepe a se
roti cu turatia ![]() (iesire din
sincronism). Alunecarea in aceste cazuri este in jur de
(iesire din
sincronism). Alunecarea in aceste cazuri este in jur de ![]() Masina
sincrona functioneaza ca asincrona si in procesul de
pornire al motorului sincron si la autosincronizarea GS. In aceste
conditii masina sincrona functioneaza stabil dar cu
parametrii variabili - cresterea curentului si a pierderilor,
variatia frecventei t.e.m.
Masina
sincrona functioneaza ca asincrona si in procesul de
pornire al motorului sincron si la autosincronizarea GS. In aceste
conditii masina sincrona functioneaza stabil dar cu
parametrii variabili - cresterea curentului si a pierderilor,
variatia frecventei t.e.m.
Masina sincrona in executie
obisnuita are o infasurare de excitatie in c.c. in
inductor, al carui camp magnetic este orientat dupa axa d. Daca
in inductor se plaseaza doua infasurari perpendicular
reciproce - dupa axele ![]() si
si ![]() ele pot fi alimentate
de la o sursa bifazata de c.a. cu frecventa
ele pot fi alimentate
de la o sursa bifazata de c.a. cu frecventa ![]() Acelasi efect se
obtine si la infasurarea trifazata de c.a., analoaga
cu cea din motorul asin-cron cu rotor bobinat.
Acelasi efect se
obtine si la infasurarea trifazata de c.a., analoaga
cu cea din motorul asin-cron cu rotor bobinat.
Astfel de masini sincrone, la care prin
infasurarea polifazata rotorica trec curenti cu
frecventa ![]() se numesc, asincronizate.
Ele sunt realizate si se folosesc ca generatoare in centralele eoliene,
centrale cu hidroacumulare, generator - motor in centralele hidroelectrice
utilizate in functionarea de varf; motoare cu posibilitate de reglare a
vitezei de rotatie la frecventa constanta a retelei.
se numesc, asincronizate.
Ele sunt realizate si se folosesc ca generatoare in centralele eoliene,
centrale cu hidroacumulare, generator - motor in centralele hidroelectrice
utilizate in functionarea de varf; motoare cu posibilitate de reglare a
vitezei de rotatie la frecventa constanta a retelei.
La GS asincronizate exista posibilitatea de mentinere constanta a frecventei curentilor in indus, cand viteza de rotatie la arbore este variabila. Prin variatia raportului dintre curentii de excitatie din infasurarile longitudinala si transversala, deci si a pozitiei spatiale a fazorilor t.m.m. de excitatie se pot regla independent puterile activa si reactiva. Schema de principiu a unui astfel de GS este indicata in fig.5.38, din care se observa ca functionarea ca GS nu se poate obtine fara un sistem complex de automatizare pentru comanda excitatiei in rotor si a intregii functionari a GS si a instalatiei de antrenare.
Exemplu, pentru generatorul eolian este necesara:
stabilizarea turatiei de rotire;
limitarea puterii la viteza mare a vantului si reducerea oscilatiilor excitatiei la viteze peste viteza maxim admisa, inclusiv masuri de franare electrica s.a.
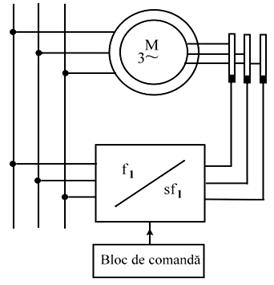
Fig.5.38 Schema de principiu a GS asincronizat
5.11. Motoare pas cu pas
Motoarele pas cu pas sunt masini sincrone, care transforma semnalele de intrare ca impulsuri electrice in unghiuri discrete sau deplasari liniare, numite pasi. La frecventa mare a impulsurilor, miscarea pas cu pas trece in miscare de rotatie continua. Motoarele pas cu pas se pot produce in serii arbitrare cu pasi in doua sensuri de rotatie fara erori in functionarea lor. Impulsurile electrice de comanda pot fi unipolare sau bipolare.
Principiul de executie si constructii
Principiul constructiv al motoarelor pas cu pas, indeosebi al rotoarelor, este asemanator cu cel al masinilor sincrone. Se utilizeaza constructia, in care in stator exista un numar mare de infasurari concentrate si plasate pe poli aparenti.
Infasurarile se alimenteaza succesiv de la sursa de comanda cu impulsuri unghiulare exacte. Din aceasta, rezulta ca fazorul fluxului magnetic se roteste in spatiu, pozitia lui fiind determinata de axa infasurarii alimentate in momentul examinat. Rotoarele motoarelor pas cu pas sunt de trei tipuri:
activ cand este magnet permanent;
reactiv cilindru cu suprafata danturata din material magnetic moale ca la motoarele sincrone reactive;
hibride in a carui constructie se utilizeaza cele doua principii de mai sus - magnet permanent si suprafata danturata din material magnetic moale.
In fig.5.39 se prezinta constructii reale ale motoarelor demontate cu statoare-le si rotoarele citate in cele 3 variante: a - activ; b - reactiv; c - hibrid. Statoarele prezentate au constructii caracteristice pentru toate motoarele pas cu pas.
Principiul de comanda al motoarelor pas cu pas
Dupa obtinerea semnalului de intrare de la dispozitivul de comanda la infa-surarile statorului, rotorul motorului pas cu pas se roteste. El se fixeaza pe directia fluxului magnetic care se excita datorita actiunii curentului prin infasurarile ali-mentate ale statorului (cel mai adesea - una sau doua).
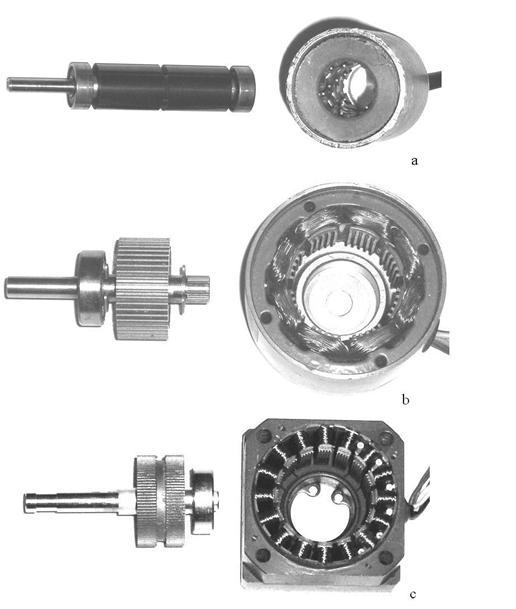
Fig.5.39 Constructii reale a motoarelor pas cu pas demontate:
a) cu rotor activ; b) cu rotor reactiv; c) cu rotor cilindric.
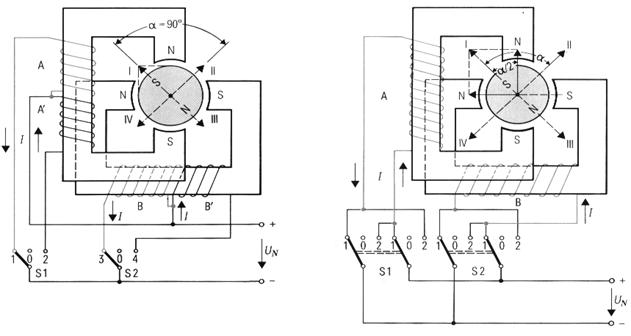
In fig.5.40 se prezinta constructia unui motor pas cu pas cu rotor activ impreuna cu doua scheme de principiu pentru comanda lor.
a b
Fig.5.40 Constructia motorului pas cu pas cu rotor activ impreuna cu schemele de principiu privind comanda lor: a) cu punct median conectat la sursa de alimentare fara modificarea polaritatii impulsului de alimentare; b) fara punct median, cu comanda bipolara;
Cele doua faze A si B ale statorului au acelasi numar de poli N si S. Diferen-ta consta in aceea ca infasurarile din fig.5.40 a au punctul median scos si conectat la sursa de alimentare, iar in schema din fig.5.40 b nu exista punct median.
Pentru schema a cele doua
iesiri de la A si B se conecteaza la cealalta pola-ritate a
alimentarii prin intrerupatoarele comandate ![]() si
si ![]() Prin acest procedeu se
formeaza cate doua jumatati de faza A si
Prin acest procedeu se
formeaza cate doua jumatati de faza A si ![]() B si
B si ![]() care se
conecteaza inde-pendent la sursa de impulsuri electrice cu tensiunea
care se
conecteaza inde-pendent la sursa de impulsuri electrice cu tensiunea ![]() Din schema se
vede ca prin
Din schema se
vede ca prin ![]() si
si ![]() trec curenti de
polaritati inverse fata de A si B, care creaza in
polii fazelor fluxuri magnetice de sensuri opuse. Exemplu, pentru prima
faza alimentata mai sus A - polul este N, iar la functionarea
lui
trec curenti de
polaritati inverse fata de A si B, care creaza in
polii fazelor fluxuri magnetice de sensuri opuse. Exemplu, pentru prima
faza alimentata mai sus A - polul este N, iar la functionarea
lui ![]() - polul este S.
Dupa acelasi procedeu se modifica polaritatile pentru
B si
- polul este S.
Dupa acelasi procedeu se modifica polaritatile pentru
B si ![]()
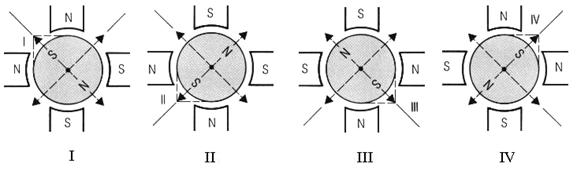
c
Fg.5.40 c Pozitiile rotorului motorului pas cu pas in timpul unei rotatii complete
In prima pozitie, polii sunt conectati
la alimentare prin pozitiile 1 si 3 ale intrerupatoarelor pentru
A si B. Rotorul se fixeaza in pozitia stabilita de fluxul
rezultant al celor doua faze (poz. I). Dupa ce ![]() se trece de la
iesirea 1, la iesirea 2, se alimenteaza
se trece de la
iesirea 1, la iesirea 2, se alimenteaza ![]() si B. Polaritatea
polilor primei faze se modifica si rotorul se roteste cu unghiul
si B. Polaritatea
polilor primei faze se modifica si rotorul se roteste cu unghiul
![]() (poz. II).
Urmeaza alimentarea lui
(poz. II).
Urmeaza alimentarea lui ![]() si
si ![]() de la iesirile 2
si 4, cand rotorul executa in sens direct urmatorul pas de
de la iesirile 2
si 4, cand rotorul executa in sens direct urmatorul pas de ![]() (poz. III).
(poz. III).
Rotorul se roteste in pozitia IV
prin conectarea la iesirile 1 si 4 a lui A si ![]() - din nou inca cu
- din nou inca cu
![]() La urmatoarea
schimbare (functioneaza A si B) se ajunge la pozitia
initiala I.
La urmatoarea
schimbare (functioneaza A si B) se ajunge la pozitia
initiala I.
In cazul examinat din fig.5.40 a nu exista modificare a polaritatii impulsu-rilor de comanda, prezentate in fig.5.40 d. Acest regim de comanda este unipolar.
Principiul comenzii bipolare este prezentat in fig.5.40 b.
In acest caz infasurarile de
faza A si B nu au punct median comun. Schimbarea sensului curentului
in faze, respectiv polaritatii polilor se obtine prin trecerea
curentului prin intreaga infasurare. Aceasta se obtine prin
intermediul intrerupatoarelor bipolare ![]() si
si ![]()
Functionarea motorului pas cu pas din
fig.5.40 b se explica potrivit
aceluiasi procedeu ca in fig.5.40 a.
In pozitia I infasurarile A si B sunt conectate la
sursa prin iesirile 1 ale intrerupatoarelor ![]() si
si ![]() ce determina
sensurile curentilor prin infasurari si polaritatea
polilor. Dupa deconectarea lui
ce determina
sensurile curentilor prin infasurari si polaritatea
polilor. Dupa deconectarea lui ![]() de la iesirea 1
si conectarea lui la iesirea 2, curentul din faza A schimba
sensul si polaritatea polilor lui A de asemenea se schimba - pozitia II. Rotorul se roteste
cu
de la iesirea 1
si conectarea lui la iesirea 2, curentul din faza A schimba
sensul si polaritatea polilor lui A de asemenea se schimba - pozitia II. Rotorul se roteste
cu ![]() potrivit sensului
noului flux rezultant.
potrivit sensului
noului flux rezultant.
Dupa schimbarea iesirilor lui ![]() de la 1 la 2 se
obtine polaritatea inversa a curentului si prin faza B, cum
si polaritatea inversa a polilor ei. Potrivit orientarii
fluxului rezultant
de la 1 la 2 se
obtine polaritatea inversa a curentului si prin faza B, cum
si polaritatea inversa a polilor ei. Potrivit orientarii
fluxului rezultant ![]() rotorul se
roteste cu unghi de
rotorul se
roteste cu unghi de ![]() in pozitia III.
Pozitia IV a rotorului se obtine dupa cuplarea de la iesirea
2 la iesirea 1 a lui
in pozitia III.
Pozitia IV a rotorului se obtine dupa cuplarea de la iesirea
2 la iesirea 1 a lui ![]() Pozitia
initiala I este dupa pasul rotorului cu
Pozitia
initiala I este dupa pasul rotorului cu ![]() cand din nou
intrerupatoarele
cand din nou
intrerupatoarele ![]() si
si ![]() sunt in pozitia
1. Daca variatia polaritatii are loc in serie inversa,
rotirea va avea loc in sens invers.
sunt in pozitia
1. Daca variatia polaritatii are loc in serie inversa,
rotirea va avea loc in sens invers.
Variatia semnalelor de comanda este bipolara. Este prezentata in al doilea sistem de coordonate din fig.5.40 d pentru fazele A si B.
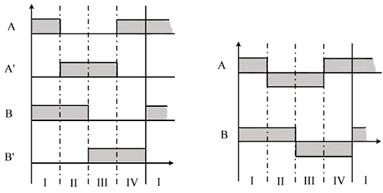
d
Fg.5.40 d Variatia bipolara a polaritatii semnalelor de comanda
Posibilitati de reducere a pasilor
Functionarea motoarelor pas cu pas din
fig.5.40 se caracterizeaza prin misca-rea rotorului cu pas complet.
In cazul in care la motorul bifazat ![]() este o pereche de poli
pe faza, atunci acest unghi este de
este o pereche de poli
pe faza, atunci acest unghi este de ![]() Unghiul
Unghiul ![]() se determina din
expresia:
se determina din
expresia:

Miscarea de rotatie neintrerupta (continua) se obtine prin aplicarea repetata a impulsurilor. La functionarea motoarelor pas cu pas se obtin unghiuri mici de rotatie a rotorului. Reducerea pasului se face in principiu potrivit urmatoarelor procedee:
alegerea potrivita a variantei motorului pas cu pas;
perfectionarea schemei de comanda a alimentarii infasurarilor.
In functie de aplicatii, se utilizeaza constructii care se perfectioneaza conti-nuu. Motoarele cu rotor activ au moment relativ mare si pozitionare stabila datorita magnetului permanent. Pentru reducerea pasului din punctul de vedere al constructiei, ele se executa cu cateva statoare inseriate, dispuse cu un unghi deter-minat unul fata de altul. Rotoarele sunt din materiale magnetice dure cu inductie remanenta mare. Se magnetizeaza zonele ce formeaza polii rotorici. Acest motor este prezentat in fig.5.41 a (ca si in fig.5.39 a), unde:
1 - rotorul in cele doua forme; 2 - statorul inferior; 3 - statorul superior;
4 - infasurarea statorului inferior; 5 - infasurarea statorului superior;
6 - piesa polara superioara a statorului superior;
7 - piesa polara inferioara a statorului superior.
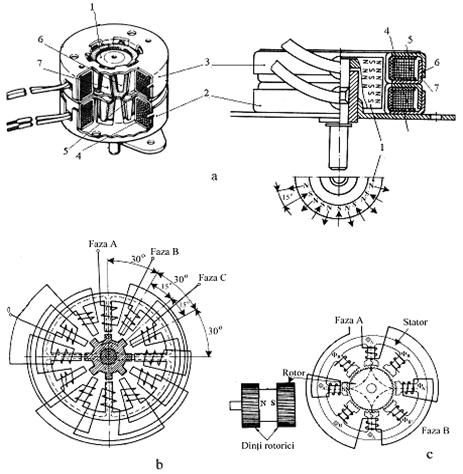
Fig.5.41 Motoare pas cu pas: a) cu doua statoare; b) cu numar mare de poli in stator si in rotor si piese polare danturate; c) motor pas cu pas cu rotor hibrid.
Motoarele reactive se alimenteaza cu impulsuri unipolare. Ele se executa cu numar mare de poli in stator si in rotor deoarece se dantureaza inclusiv si piesele polare (fig.5.41 b si fig.5.41 b). Motoarele pas cu pas cu rotor hibrid au constructie complexa pentru rotor. El are magnet permanent plasat intre doua bucsi (camasi) dintate. Aceste piese danturate sunt rotite una fata de cealalta cu jumatate din latimea dintelui. Magnetul permanent este magnet alcalin si acesta determina polarizatia inversa a bucselor dintate.
Comanda pasilor
Principiul de functionare al motorului
din fig.5.40 consta in deplasarea rotorului cu pas complet (in cazul ![]() ). In functie de comanda, rotatia se poate
realiza cu unghi de
). In functie de comanda, rotatia se poate
realiza cu unghi de ![]() (jumatate de pas); cu unghi de
(jumatate de pas); cu unghi de ![]() (sfert de pas).
(sfert de pas).
Daca pentru motorul din fig.5.40 b notam cu A si B
functionarea la sensul pozitiv al curentilor, iar cu ![]() si
si ![]() - la sensul negativ, se poate arata diferenta in
pozitia polilor S-N la pas intreg, pe jumatate si pe sfert.
Steaua din fig.5.42 a indica
pozitia rotorului (S-N), care corespunde la pas complet (fig.5.40).
Liniile pline, cu sageti, indica orientarea polilor N-S. In fig.5.42
b este data steaua
pozitiilor rotorului la jumatate de pas. In timp ce in primul caz,
curentul trece totdeauna prin doua infasurari, aici aceasta
este valabila pentru primul, al treilea, al cincilea pas s.a.m.d. Pentru
cel de-al doilea, al patrulea, al saselea pas s.a.m.d., curentul
trece numai prin una din cele doua infasurari A si B.
Pentru rotirea completa a rotorului sunt necesari 8 pasi
- la sensul negativ, se poate arata diferenta in
pozitia polilor S-N la pas intreg, pe jumatate si pe sfert.
Steaua din fig.5.42 a indica
pozitia rotorului (S-N), care corespunde la pas complet (fig.5.40).
Liniile pline, cu sageti, indica orientarea polilor N-S. In fig.5.42
b este data steaua
pozitiilor rotorului la jumatate de pas. In timp ce in primul caz,
curentul trece totdeauna prin doua infasurari, aici aceasta
este valabila pentru primul, al treilea, al cincilea pas s.a.m.d. Pentru
cel de-al doilea, al patrulea, al saselea pas s.a.m.d., curentul
trece numai prin una din cele doua infasurari A si B.
Pentru rotirea completa a rotorului sunt necesari 8 pasi ![]()
In fig.5.42 c este prezentata realizarea regimului cu 4 pasi. Noua
pozitie a rotorului dintre cele doua pozitii cu semipas se pot
obtine, daca se conecteaza si jumatatile
infasurarilor A si B - pozitiile 2, 4, 6 s.a.m.d.
Pentru pozitiile 3, 7, 11, 15 se alimenteaza cu curent in sens direct
sau invers intregile faze independente, iar pentru pozitiile 1, 5, 9, 13 -
simultan doua faze A sau ![]() si B sau
si B sau ![]()
A' A' A' A' A' A'
![]()
![]()
![]()
![]()
![]()
Fig.5.42 Pozitiile rotorului pentru diferiti pasi: a) pas complet;
b) pentru pas pe jumatate; c) regimul cu patru pasi.
Masuri de imbunatatire a functionarii motoarelor pas cu pas
Cresterea numarului de impulsuri,
respectiv a pasilor, ridica probleme legate de functionarea
rapida si exactitatea in stabilirea pasilor. Impulsurile
tensiunii de alimentare sunt dreptunghiulare. Deoarece
infasurarile statorice au inductivitate importanta,
curentul la conectarea infasurarii variaza ca in procesele
tranzitorii din circuite RL cu constant de timp ![]() , cum se prezinta in fig.5.43 a.
, cum se prezinta in fig.5.43 a.
La viteza mai mare de crestere a curentului se poate obtine daca se folosesc unele variante:
prin reducerea constantei de timp
(prin conectare de ![]() si tensiune U
ridicata;
si tensiune U
ridicata;
prin doua nivele ale tensiunii de alimentare si prin comanda mai complexa,
dupa cum se aplica impulsul de comanda (chopper - de comanda) si se alege tensiunea de alimentare suficient de mare.
In primul caz se obtine:  dar pe
dar pe ![]() apar pierderi excesive
(inutile).
apar pierderi excesive
(inutile).
In al doilea caz este necesara o
sursa cu doua nivele de tensiune ![]() si
si ![]() La inceput se
aplica tensiunea inalta
La inceput se
aplica tensiunea inalta ![]() si curentul
creste rapid. Dupa un timp stabilit alimentarea se comuta la
tensiunea
si curentul
creste rapid. Dupa un timp stabilit alimentarea se comuta la
tensiunea ![]() Aceasta
varianta de comanda ofera rezultate mai bune la moment de
antrenare ridicat si cresteri a frecventei impulsu-rilor de
comanda.
Aceasta
varianta de comanda ofera rezultate mai bune la moment de
antrenare ridicat si cresteri a frecventei impulsu-rilor de
comanda.
Forma impulsurilor de curent si variatia lui la comanda prin impuls cu doua nivele de tensiune se prezinta in fig.5.43 b.
Comanda prin impuls este ilustrata in
fig.5.43 c. Aceasta metoda
ofera indicii cei mai buni pentru accelerarea motorului fara a
se inrautati ![]()
La motoarele pas cu pas se defineste frecventa de sensibilitate. Aceasta este frecventa maxima a impulsurilor pentru care rotorul se roteste cu unghiul dat fara a se omite pasul. Acest indicator depinde sensibil de mijloacele examinate de comanda si este mai bun decat la comanda prin impuls.
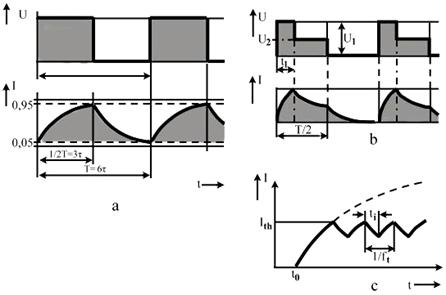
Fig.5.43 Variatia curentului prin infasurari: a) ca in procesele tranzitorii din circuitele RL;
b) la comanda prin impuls cu doua nivele de tensiune; c) comanda prin impulsuri.
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |
