Masini asincrone speciale
Fata de destinatia lor, masinile asincrone speciale sunt motoare de executie si masini electrice de informatie. Din grupa a doua, reprezentative sunt: tahogene-ratoarele si generatoarele de accelerare, transformatoarele rotative si selsinele.
1. Motoare de executie
Motoarele de executie transforma semnalul electric de intrare in semnal me-canic de iesire. Aceste semnale sunt: tensiunea de alimentare a infasurarii statorice si turatia variabila a motoarelor asincrone. Cerinta transformarii este asigurata daca se realizeaza o dependenta liniara intre marimile de intrare si iesire cu cea mai mare rapiditate posibila. Acceleratia motoarelor de executie depinde de momentul de inertie al rotorului. Utilizare mai mare au motoarele asincrone cu rotor nemag-netic gol (fig.3.32).
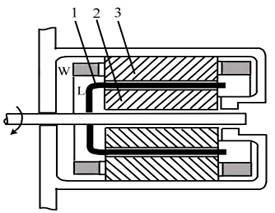
Fig.3.32 Motor asincron de executie cu rotor nemagnetic gol
Se utilizeaza insa si motoare asincrone cu rotor in scurtcircuit, cu rotor fero-magnetic compact, cu rotor feromagnetic gol la care constantele lor mecanice de timp sunt sensibil mai mari.
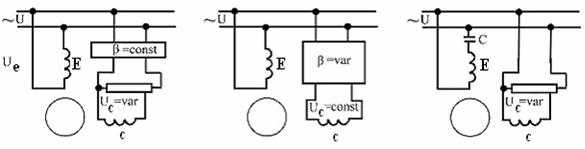
Motoarele de executie, cel mai adesea sunt monofazate. Infasurarea care pri-meste semnalul de intrare, se numeste de comanda wc. A doua infasurare we este alimentata cu tensiune alternativa cu valoarea eficace Ue=const. Motoarele de exe-cutie sunt cu rotor nemagnetic gol (1) fig.3.32 si stator interior imobil (2) fig. 3.32 din material feromagnetic pentru reducerea reluctantei pe drumul fluxului. Rotorul gol este realizat din aluminiu sau aliaj din aluminiu. Infasurarile wc si we sunt plasate in statorul exterior (3) fig.3.32 si decalate cu 90° in spatiu. Procedeele de baza privind realizarea comenzii sunt:
comanda in amplitudine, cand se modifica numai valoarea amplitudinii tensiunii Uc cu mentinerea neschimbata a fazei;
comanda in faza, cand amplitudinea ramane neschimbata, iar turatia n se regleaza prin variatia unghiului de defazaj al tensiunii Uc fata de Ue;
comanda in amplitudine-faza, cand simultan se modifica si amplitudinea si faza semnalului de comanda Uc fata de Ue.
Schemele de comanda sunt prezentate in fig.3.33. Mai usor de realizat este comanda in amplitudine-faza, deoarece nu se cer surse speciale de variatie a fazei tensiunii Uc sau retea bifazata de alimentare sau sursa.
Caracteristicile de reglare ce reprezinta particularitatile motoarelor asincrone de executie, sunt date in fig.3.34. Acestea reprezinta dependentele turatiei de ro-tatie n de semnalele de comanda Uc sau βc la variatia marimii momentului rezistent (de sarcina) M la arborele motorului pentru schemele de comanda a, b si c. Cel mai adesea, aceste dependente se prezinta in unitati relative:
 unde
unde ![]() este turatia la
functionarea in gol;
este turatia la
functionarea in gol;
 unde
unde ![]() este momentul la
scurtcircuit (cu rotorul imobil);
este momentul la
scurtcircuit (cu rotorul imobil);
 sau
sau ![]() , unde
, unde ![]() - valoarea relativa a semnalului de comanda.
- valoarea relativa a semnalului de comanda.
a b c
Fig. Schemele de comanda ale motorului asincron monofazat de executie
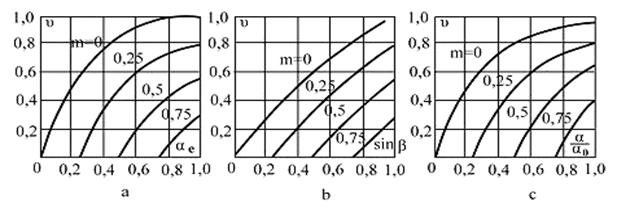
Fig. Caracteristicile de reglaj
ale motorului asincron de executie: dependentele turatiei n de
semnalele de comanda Uc
si ![]() la variatia momentului rezistent
la variatia momentului rezistent
2. Tahogeneratoare si generatoare de accelerare
Destinatia tahogeneratoarelor este aceea
de a transforma semnalul mecanic de intrare in semnal electric.
Functionarea lui ca generator de t.e.m. consta in reali-zarea
dependentei ![]() pe cat posibil mai
apropiata de o dreapta. Tahoge-neratoarele sunt utilizate pentru
masurarea turatiei, pentru legaturi inverse dupa
viteza in schemele de automatizare, ca generatoare de accelerare s.a..
pe cat posibil mai
apropiata de o dreapta. Tahoge-neratoarele sunt utilizate pentru
masurarea turatiei, pentru legaturi inverse dupa
viteza in schemele de automatizare, ca generatoare de accelerare s.a..
Obisnuit, tahogeneratoarele sunt
masini asincrone de executie cu doua infa-surari
dispuse la 90° in spatiu. Este preferata masina cu rotorul
nemagnetic gol, dupa cum si la motoarele de executie exista
stator interior imobil din material feromagnetic. Spre deosebire de motoarele
de executie, la tahogeneratoare, rotorul gol se realizeaza din
material cu rezistenta electrica mai mare pentru reducerea
erorilor din caracteristica de iesire (fosfor-bronz , beriliu-bronz
s.a).Schema taho-generatorului este prezentata in fig.3.35 si se
examineaza doua momente ale func-tionarii sale: pentru n=0
si ![]()
In cazul rotorului imobil, dupa alimentarea infasurarii de excitatie we in infasurarea generatoare wG nu se induce t.e.m. de miscare; aceasta datorita faptului ca in rotorul gol datorita actiunii fluxului pulsatoriu al infasurarii we se induce numai t.e.m. de transformare.
Prin rotorul scurtcircuitat trec curentii turbionari care creaza flux numai dupa axa infasurarii we.
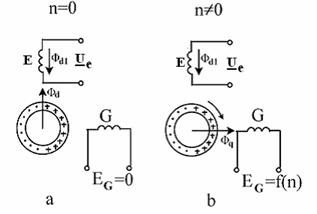
Fig.3.35 Schema electrica simplificata a tahogeneratorului
La rotirea rotorului nemagnetic gol, in el se induc t.e.m. de rotatie. Curentii turbionari determinati de aceste t.e.m. creaza fluxul a carui axa coincide cu axa in-fasurarii wG si induce in ea t.e.m. EG. Amplitudinea t.e.m. EG este proportionala cu turatia n iar frecventa ei este egala cu frecventa tensiunii de excitatie Ue. Functio-narea tahogeneratorului se bazeaza pe caracteristica lui de iesire:
![]() (3.52)
(3.52)
unde:
![]() - este unghiul de
rotatie al arborelui.
- este unghiul de
rotatie al arborelui.
Numai la tahogeneratorul ideal aceasta dependenta poate fi liniara. In func-tionarea tahogeneratorului real actioneaza diferiti factori, care provoaca abateri ale caracteristicii reale de la forma ei ideala, introduc erori si reduc exactitatea. Cauzele care provoaca neliniaritatea caracteristicii de iesire sunt urmatoarele:
reactia electromagnetica a rotorului;
caderea de tensiune la sarcina pe infasurarea generatoare;
variatia unor parametri in functie de turatia la rotire (de ex: rezistenta a rotorului nemagnetic gol);
variatia parametrilor datorita saturatiei, temperaturii s.a.
Se determina si eroarea de amplitudine si faza care se reduce prin cresterea rezistentei specifice a rotorului si amplificarea frecventei f a tensiunii de alimentare a infasurarii de excitatie (ex. 400 Hz).
Caracteristica de iesire si dependenta ei de impedanta de sarcina este indica-ta in fig.3.36. Din aceasta caracteristica prin calculul inclinarii ei se determina constanta tahogeneratorului (tensiunea de iesire Uiesire la turatie determinata, cel mai adesea 1000 rot/min).
 (3.53)
(3.53)
unde:
![]() - turatia maxima de lucru a
tahogeneratorului pentru care se obtine aba-terea maxim admisibila.
- turatia maxima de lucru a
tahogeneratorului pentru care se obtine aba-terea maxim admisibila.
Fig.3.36 Caracteristica de iesire a tahogeneratorului si dependenta ei de impedanta de sarcina
Din fig.3.36 se poate trage concluzia cu
privire la impedanta preferata a consumatorului electric (aparatul de
masura sau schema de comanda). Daca infasurarea
de excitatie se alimenteaza de la sursa de tensiune
continua, tensiunea de iesire este proportionala cu
deceleratia rotorului la rotirea lui in sens invers. In acest caz
masina asincrona se numeste generator de acceleratie
si ![]()
3. Transformatoare rotative (rezolvere)
Transformatoarele rotative transforma semnalul mecanic ca unghi de rotatie in tensiune alternativa, care se modifica dupa o lege cunoscuta prealabil. Se utili-zeaza in instalatii de automatizari, in sisteme de urmarire si in alte scheme de co-manda automata, inclusiv de obtinere a semnalului de pozitie a rotorului fara perii (fara colector) al motoarelor de curent continuu. In literatura si in practica deja se utilizeaza mai des denumirea de "rezolver". Formele lui de baza sunt:
rezolver bipolar;
rezolver multipolar.
Rezolverul bipolar consta din stator si rotor in ale caror circuite magnetice sunt dispuse cate doua infasurari reciproc perpendiculare. O infasurare-(infasura-rea S1,2) se alimenteaza de la o sursa de tensiune sinusoidala. Fluxul magnetic Ф1 induce in infasurarile rotorice R1,2 si R3,4 tensiuni alternative de aceeasi frecventa. Amplitudinile lor depind de unghiul de defazare al infasurarilor R1,2 si R3,4 fata de S1,2. In fig.3.37 a este aratata constructia de principiu a rezolverului precum si reprezentarea grafica des intalnita pentru infasurarile rotorice. Tensiunea de alimentare U1 si tensiunile de iesire U2 si U3 sunt indicate in fig.3.37 c. Tensiunile de iesire se determina din expresiile pentru t.e.m. induse:
Cate doua infasurari pot fi dispuse prin doua procedee posibile in partile imobila si mobila ale rezolverului. In fig.3.37 d infasurarea de excitatie este plasata in rotor iar cele de iesire in statorul rezolverului. Sunt indicate prin dreptunghiuri inegrite si perpendiculare. Acolo se vad si dependentele grafice ale curbelor (anvelopelor) pentru U1, U2, U3 in functie de timp (ωt)/ unghi (α).
Atunci cand la iesirea infasurarilor R1,2 si R3,4 se conecteaza impedantele de sarcina Z2 si Z3, curentii care le strabat creaza fluxurile magnetice Ф2 si Ф3. Ele se descompun in componentele:
longitudinala Фd - orientata dupa axa infasurarii alimentate cu tensiunea U1;
transversala Фq - perpendiculara pe cea longitudinala.
Componentele longitudinale Фd se echilibreaza cu actiunea fluxului de excitatie Ф1 ce actioneaza dupa aceeasi axa. Fluxul Фq provoaca aparitia erorilor in dependentele de iesire. Pentru inlaturarea acestor erori se realizeaza:
compensarea primara - in timp ce lucreaza numai o infasurare, exemplu cea sinusoidala R1,2, infasurarea S3,4 se leaga in scurtcircuit sau cu impedanta Zk de marime potrivita. Curentul care trece prin ea creaza fluxul Фk dupa axa q, care compenseaza actiunea cuplului Ф2q (fig.3.38 a);
compensarea secundara -atunci cand functioneaza si cele doua infasurari R1,2 si R3,4, impedantele se calculeaza incat Ф2q=Ф3q si reciproc se echilibreaza (fig.3.38 b).
a b
c
d
Fig.3.37 a, b, c, d Constructia de principiu a rezervorului impreuna cu plasarea infasurarilor rotorice: a), b), c) - variatiile tensiunilor U1, U2, U3; d) plasarea infasurarii de excitatie in rotor iar a celor de iesire in stator
a b
Fig.3.38 Procedee de inlaturare a abaterilor dependentelor de iesire;
a) compensarea primara; b) compensarea secundara.
Rezolverul polifazat se utilizeaza atunci cand este necesara o precizie mai inalta, indeosebi la transmiterea la distanta a unghiului si la transformarea lor in forma digitala. Exista diferite constructii, exemplu reductosin, inductosin s.a. des-crise in literatura de specialitate.
4. Selsine
Selsinele sunt masini de inductie, prin intermediul carora se realizeaza roti-rea sincrona a doua dispozitive sau rotirea lor cu acelasi unghi fara executia legatu-rii mecanice intre ele. Se numesc si "sincro". Pentru sincronizarea dispozitivelor de conducere la arborii lor se asigura legatura mecanica a celor doua selsine:
selsinul conducator (emitatorul) este montat la arborele dispozitivului ce determina unghiul de rotatie sau turatia;
selsinul condus (receptorul) ce conduce al doilea dispozitiv care reali-zeaza unghiul dat de rotire sau turatia.
Legatura dintre cele doua selsine este electrica. Sistemele de rotatie sincrona sunt pentru comanda motoarelor electrice de puteri mari. In acest scop se folosesc motoare asincrone trifazate cu rotor bobinat, la care infasurarile rotorice se conec-teaza electric.
In sistemele de comanda automata si control se aplica selsine monofazate, care sunt de putere mica si obisnuit transmit semnalul ca unghi de rotatie.
Selsinele monofazate au doua infasurari:
de excitatie, monofzata;
de sincronizare cu trei infasurari dispuse in spatiu cu un unghi de 120° intre ele - ca infasurarile trifazate.
De obicei, infasurarea de excitatie este concentrata si este plasata pe poli iar cea de sincronizare totdeauna este distribuita in crestaturile miezului magnetic.
Selsinele sunt cu contacte (fig.3.39 a) si fara contacte (fig.3.39 b). La selsi-nele de prima forma, o infasurare este in stator, iar cealalta in rotor - se prezinta doua variante posibile. Pentru realizarea legaturii cu infasurarea rotorului exista inele de contact si perii.
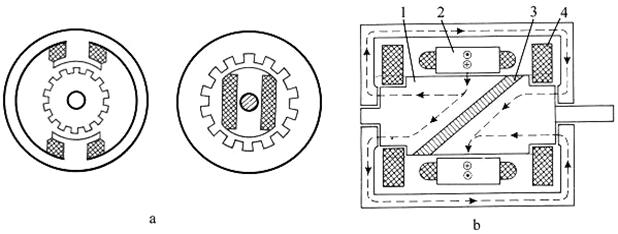
Fig.3.39 Selsine: a) cu contacte; b) fara contacte.
Neajunsurile selsinelor cu contcte se evita prin utilizarea de selsine fara contacte (fig.3.39 b). La acestea si cele doua infasurari (de excitatie 4 si cea de sincronizare 2) sunt in stator. Rotorul este realizat din doua pachete de tole de otel electrotehnic (1), separate intre ele de un spatiu nemagnetic (aliaj de aluminiu, 3).
Spatiul nemagnetic creaza o reluctanta mare pe drumul fluxului magnetic al infasurarii de excitatie. Datorita acesteia, fluxul magnetic trece prin circuitul mag-netic si cuprinde spirele infasurarii de sincronizare prin doua treceri ale intrefieru-lui dintre stator si rotor cand nu traverseaza spatiul nemagnetic.
Prin acest procedeu valoarea t.e.m. induse in cele trei faze ale infasurarii de sincronizare depinde de unghiul de rotatie al rotorului, respectiv, de spatiul nemag-netic dintre axele lor. In fig.3.39 b, cu linie intrerupta este indicat traseul fluxului magnetic. Acolo unde el este perpendicular pe desen (plan) este notat analog con-ductorului prin care trece curent cu sens determinat-cu punct sau sageata. Scheme-le de lucru ale selsinelor-indicatoare (inregistratoare) si transformatoare (conduse) sunt date in fig.3.40.
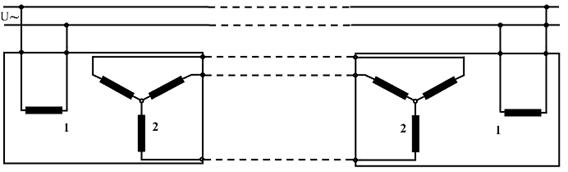
Fig.3.40 Schema de lucru pentru selsinul indicator
In figura, infasurarea de excitatie monofazata este notata cu 1 iar cea trifazata de sincronizare este notata cu 2. Schema indicatoare are aplicatie in cazul in care este nevoie de transmitere ca informatie, unghiul de rotire al masinii de lucru. In aceasta schema cu dispozitivul de lucru este cuplat selsinul emitator. Al doilea - (selsinul receptor de semnal), se roteste datorita momentului intern obtinut prin potrivirea (sincronizarea) unghiurilor celor doua selsine. El se determina din interactiunea fluxurilor de excitatie ale selsinelor, cu curentii ce trec prin infasu-rarile lor de sincronizare si liniile de legatura datorita diferentei t.e.m. din fazele de acelasi nume, dupa sincronizarea lor. Momentul obtinut e mic si la arborele receptorului se poate cupla numai indicatorul unghiului de rotatie. Acest regim de lucru se poate folosi pentru obtinerea de semnal pentru deplasarea partilor, pentru atingerea nivelului s.a., in locuri inaccesibile si periculoase pentru urmarire directa, exemplu a nivelului in cisterne, in reactoare atomice s.a.
In fig.3.41 este prezentata schema de conexiune pentru selsine transforma-toare. Ea este potrivita pentru aplicatii in cazurile cand la arborele selsinului recep-tor este aplicat un moment rezistent mai mare. Atunci rotirea rotorului sau cu un-ghiul dat se realizeaza cu ajutorul unui motor de executie-exemplu motor asincron cu rotor nemagnetic gol.
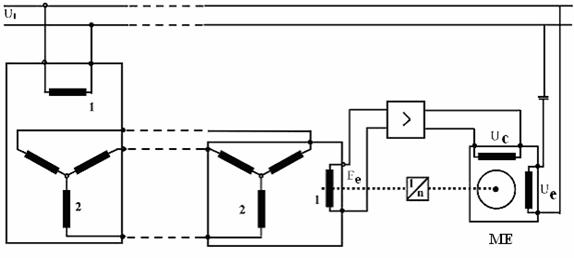
Fig.3.41 Schema de conexiuni pentru selsine comandate
Semnalul obtinut prin variatia t.e.m. induse in infasurarea de sincronizare a selsinului emitator, modifica curentul din infasurarile de sincronizare ale selsinelor. Liniile de legatura ale fluxului, create de trecerea curentilor induc in infasurarea de excitatie a receptorului t.e.m. Er, care dupa amplificare serveste ca semnal de co-manda a motorului de executie.Datorita defazajului spatial intre Ф si Er, rotorul re-ceptorului se stabilizeaza in pozitia initiala, deplasat cu 90° fata de rotorul emitato-rului. Atunci prin sincronizarea selsinelor se obtine semnal nul.
Schemele de aplicare simultana a selsinelor si transformatoarelor rotative se folosesc in statiile de radiolocatie. In ultimul timp in functie de rolul lor se utilizea-za dispozitive fotorezistente bazate pe principiul fotoelectric.
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |
