REGULATOARE AUTOMATE
1. Scurt istoric
Pentru automatizarea proceselor tehnologice se folosesc dispozitive de automatizare care pe baza informatiilor primite de la procese si utilizand anumiti algoritmi elaboreaza marimile de comanda sau de conducere ale procesului.
Sistemul de reglare automata (SRA) este sistemul automat la care marimea de iesire din proces este mentinuta la o valoare constanta prestabilita sau, dupa caz, aceasta urmareste o lege de variatie prescrisa in sistem.
Primul SRA a aparut odata cu aparitia masinii cu abur - regulatorul Watt.
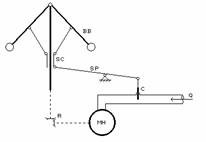
Fig.1. Regulatorul Watt
Organul de executie al masinii cu abur (motorul hidraulic MH) antreneaza prin intermediul reductorului R cu viteza unghiulara ω o tija pe care sunt prinse doua greutati prin brate cu bile BB (fig.1). Cu cat ω este mai mare cu atat cele doua greutati se indeparteaza de tija sub actiunea fortei centrifuge. Rezulta ca pozitia greutatilor ne da informatii cu privire la viteza unghiulara a tijei si implicit viteza dezvoltata de masina cu abur. Pentru a realiza o reglare a vitezei prin sistemul culisant SC si sistemul cu parghii SP se actioneaza o clapeta C care inchide mai mult sau mai putin alimentarea cu abur a masinii. Astfel se modifica debitul de alimentare cu abur a masinii hidraulice MH.
Neajunsul primelor sisteme de reglare este inertia mare a acestora. Odata cu dezvoltarea amplificatoarelor magnetice incepe utilizarea acestora in sistemele de reglare: amplidina, regulex si amplificatorul magnetic.
In continuare putem aminti aparitia regulatoarelor cu relee magnetice mono, bi si tripozitionale, acestea fiind foarte mult utilizate si astazi in automatizarea anumitor procese. Odata cu aparitia electronicii au aparut si s-au dezvoltat regulatoarelor electronice, la inceput cu tuburi, apoi cu tranzistoare si cu circuite integrate. In prezent ia amploare utilizarea regulatoarelor programabile cu microprocesor sau microcontroller.
La baza reglarii unui proces se afla unul din urmatoarele principii: principiul compensarii si principiul reglarii automate.
2. Locul si functia regulatorului in cadrul SRA
Elementul principal al unui SRA sau dispozitiv de automatizare in circuit inchis destinat mentinerii marimii de iesire la o anumita valoare, indiferent de natura perturbatiilor este regulatorul automat RA (fig.2).
Regulatorul automat RA impreuna cu elementul de prescriere EP, elementul de comparatie EC, elemetul de executie a reglarii EER si traductorul T constituie dispozitivul de automatizare DA. Sistemul automat astfel realizat (dispozitivul de automatizare DA impreuna cu procesul tehnologic PT) formeaza un sistem de reglare automata SRA.

Fig.2. Schema bloc a unui SRA
Elementul de prescriere EP genereaza marimea de intrare u care, la o anumita scara, reprezinta tocmai ceea ce dorim sa obtinem la iesirea din procesul tehnologic PT.
Elementul de comparatie EC compara marimea prescrisa u cu marimea de reactie yr si ne da eroarea a sistemului :
![]()
Regulatorul automat RA este elementul de automatizare care primeste la intrarea sa eroarea ε a sistemului, o prelucreaza calitativ si cantitativ dupa o anumita functionala si elaboreaza marimea de conducere c cu scopul mentinerii marimii de iesire y a procesului la o valoare prestabilita.
Elementul de executie a reglarii EER adapteaza sau converteste marimea de comanda c la proces. Iesirea din EER este marimea de executie ym care reprezinta tocmai intrarea in procesul tehnologic PT.
3. Legea reglarii
Legea reglarii este dependenta functionala intre marimea de intrare a regulatorului (eroarea ε a sistemului) si marimea de iesire a acestuia (marimea de conducere c
![]()
Pentru regulatoarele liniare functionala F trebuie sa fie liniara si continua si va trebui sa contina componente care sa imbunatateasca calitatile dinamice ale procesului reglat.
Legea reglarii este o combinatie de efecte dinamice elementare ce se introduc cu scopul imbunatatirii performantelor unui SRA astfel :
efectul proportional P are ca efect marirea sensibilitatii, cresterea preciziei, mareste suprareglarea, scade eroarea stationara, reduce durata procesului tranzitoriu si inrautateste stabilitatea;
efectul de integrare I are ca efect: inbunatatirea preciziei, reduce eroarea stationara, mareste durata procesului tranzitoriu, mareste suprareglarea si inrautateste stabilitatea;
efectul de diferentiere D are ca efect: Inbunatatirea stabilitatii, reduce durata procesului tranzitoriu, dar mareste suprareglarea.
Alegerea ponderii fiecarui efect, in cadrul legii reglarii, se face printr-o analiza tehnico-economica justificativa. In cazul general, legea reglarii are expresia :

si se obtine legea reglarii sub forma temporala :

unde : kR - coeficientul de transfer sau factorul de amplificare al regulatorului : kR=k1;
Ti -
Td - timpul de diferentiere al regulatorului : Td=k3 /k1.
Aplicand
transformata
![]()
de unde rezulta functia de transfer a regulatorului :
![]()
Prin particularizare se obtin urmatoarele variante de regulatoare liniare:
regulator P - are functia de transfer :
![]()
regulator PI - are functia de transfer :
regulator PD - are functia de transfer :
![]()
regulator PID - are functia de transfer :

4. Principiul constructiv al regulatoarelor
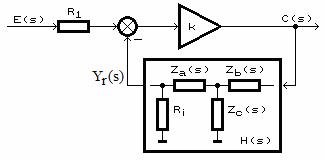
Fig.3. Principiul constructiv al regulatoarelor
In general functia de transfer a regulatoarelor este improprie (are gradul numaratorului mai mare decat gradul numitorului) si de aceea realizarea practica se face pe principiul schemelor cu legatura inversa negativa (principiul asimptotic sau la limita) ca in figura .
Functia de transfer a regulatorului va fi (deoarece k este foarte mare)
ceea ce ne permite sa construim regulatorul utilizand pe calea directa un amplifictor operational cu factor mare de amplificare si pe reactia negativa un bloc cu functia de transfer H(s)=1/GR(s). Blocul cu functia de transfer H(s) este de regula un cvadripol in T avand impedantele operationale Za(s), Zb(s), Zc(s) caruia i se aplica la intrare marimea de comanda C(s) si rezulta la iesire marimea de reactie Yr(s). Functia de transfer a acestui bloc se calculeaza tinand seama ca are drept sarcina rezistenta de intrare Ri a amplificatorului operational care este mult mai mare decat impedantele Za(s), Zb(s), Zc(s). Facand calculele rezulta :
![]()
In regim normal de functionare rezistenta Ri este suntata de rezistenta R1 mult mai mica decat Ri si deci :
![]()
ceea ce ne permite sa scriem forma finala :
![]()
Prin particularizarea impedantelor Za, Zb si Zc se obtin regulatoarele automate dorite.
1.5. Regulatorul P
Schema de principiu a regulatorului P este prezentata in figura 1.4.a. S-au ales impedantele :
pe care le inlocuim in relatia de calcul pentru H(s) si rezulta :

unde kR=R2 /R1 si de unde se obtine :
![]()
Graficul raspunsului la intrare treapta unitara si graficele de frecventa ale regulatorului P sunt prezentate in figurile 1.4.b ÷ 1.4.e. Din acestea se trag urmatoarele concluzii :
Fig. 1.4. Regulatorul P - schema de principiu si graficele
iesirea urmareste intrarea multiplicata cu coeficientul detransfer kR;
amplificarea este constanta (kR) indiferent de valoarea pulsatiei;
regulatorul P nu atenueaza;
defazajul intre iesire si intrare este nul.
Regulatorul PI
Acesta este prezentat in figura 1.5.a in s-au ales impedantele :

si, dupa inlocuire si efectuarea calculelor, rezulta :

unde kR=R2 /R1 , TI=R2 C1 si de unde se obtine :
Pe baza graficului raspunsului la intrare treapta unitara si a graficelor de frecventa ale regulatorului PI (figura 1.5.b ÷ 1.5.e) se trag urmatoarele concluzii :
iesirea integreaza intrarea incepand cu valoarea intrarii multiplicata cu coeficientul de transfer kR.
amplificarea este maxima (teoretic infinita) pentru frecventa nula si amplificarea scade si tinde la valoarea kR cu cresterea frecventei;
pana la valoarea ω=1/Ti regulatorul PI este atenuator, dupa care atenuare este 0;
defazajul este in urma si tinde la 0 cu cresterea frecventei.
Fig. 1.5. Regulatorul PI - schema de principiu si graficele
1.7. Regulatorul PD
Regulatorul PD este prezentat in figura 1.6.a, pentru acesta s-au ales impedantele :
si, dupa inlocuire si efectuarea calculelor, rezulta :

unde kR=R2+R3 / R1 , Td= R2 R3 C1 / (R2+R3) si de unde se obtine :
![]()
Pe baza graficelor regulatorului PD (fig.1.6.b ÷1.6.e) se trag urmatoarele concluzii :
la variatia intrarii, iesirea executa un impuls dupa care urmareste intrarea multiplicata cu coefiecientul de transfer kR;
amplificarea este minima si este egala cu kR pentru frecventa nula si creste nemarginit (teoretic) cu cresterea frecvetei;
regulatorul PD este slab atenuator;
defazajul este inainte tinde de la 0 la cu cresterea frecventei.
Fig. 1.6. Regulatorul PI - schema de principiu si graficele
1.8. Regulatorul PID
Acest regulator este prezentat in figura 1.7.a unde s-au ales :
si, dupa inlocuire si efectuarea calculelor, rezulta :

unde :
si de unde se obtine :
Fig. 1.7. Regulatorul PI - schema de principiu si graficele
Pe baza graficelor din figurile 1.7.b ÷ 1.7.e se trage concluzia ca regulatorul PID imbina calitatile celorlaltor regulatoare :
la variatia intrarii, iesirea executa un impuls dupa iesirea integreaza intrarea incepand cu valoarea intrarii multiplicata cu coeficientul de transfer kR;
amplificarea este maxima (teoretic infinita)
pentru frecventa nula, scade si este minima
(egala cu kR pentru
frecventa ![]() dupa care
creste nemarginit (teoretic infinita) cu cresterea
frecvetei;
dupa care
creste nemarginit (teoretic infinita) cu cresterea
frecvetei;
pana la valoarea ω=1/Ti regulatorul PID este atenuator, iar dupa valoarea ω=1/Td regulatorul este slab atenuator;
defazajul ia valori intre - si
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |
