Sistemul de vedere uman
In foarte multe domenii de aplicatii [29][53][54][55][56][ 80] este prezenta o tendinta inevitabila, aceea de a folosi ca model sistemele biologice, in special sistemele umane. Aplicatiile robotice si de vedere artificiala, prin natura lor, sunt intr-o masura si mai mare afectate de aceasta tendinta. Despre avantajele unei astfel de abordari nu este necesar sa insistam. Putem sa subliniem insa limitele proiectelor bazate pe astfel de modele. O prima limitare pare mai degraba una de ordin filozofic si este legata limitele autocunoasterii in general. Putem sa analizam in detaliu o multitudine de procese fizice si chimice care au loc la nivelul diferitelor sisteme de locomotie si perceptie umane. Problemele se complica in momentul in care dorim sa ne folosim propriul creier pentru a afla cum folosim noi insine informatiile disponibile pentru a lua deciziile necesare. Este o problema extrem de complicata sa ne explicam cum reusim intr-un timp foarte scurt sa apreciem daca ceea ce vedem este un scaun sau un fotoliu. Daca printr-un miracol am intra in posesia "schemei" utilizate atunci ne-am lovi de o a doua limitare. Cu siguranta respectiva "schema" nu se bazeaza pe folosirea informatiei numerice asa cum suntem noi obligati sa facem ca utilizatori de calculatoare. Este instructiv sa constientizam faptul ca incercam sa copiem abilitatile sistemelor biologice bazandu-ne pe posibilitatea oferita de sitemele de calcul de a aduna si deplasa cifre binare, 1 si 0.
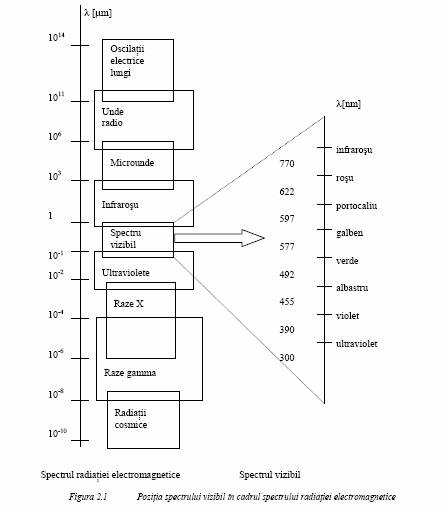
Sistemul vedere uman are trei componente principale: senzorul (ochiul), calea de transmisie (nervul optic) si unitatea de prelucrare (creierul). Principial functionarea poate fi descrisa simplu. Lumina este focalizata cu ajutorul unei lentile pe senzorul propriu-zis (retina). Printr-un proces bioelectrochimic se genereaza semnal electric ca raspuns la stimulul luminos. Semnalul este trimis pe nervul optic pana la creier unde se creaza forme neurologice pe care noi le percepem ca imagini si le interpretam punandu-le in legatura cu lumea exterioara. Lumina pe care o poate percepe ochiul uman ocupa o mica parte a spectrului undelor electromagnetice (figura si corespunde doar frecventelor cuprinse intre aproximativ 400 nm si 800 nm. Lentila este formata din apa (65 %), grasimi (6%) si proteine (intr-un procent mai mare decat oricare alt tesut). Ea este colorata usor in galben si absoarbe sub 0 % din spectrul vizibil al luminii. Razele infrarosii si cele ultraviolete sunt absorbite de proteiele din structura lentilei.
Din punct de vedere senzorial, la nivelul retinei, exista o ierarhizare concretizata in specializarea elementelor individuale senzoriale. "Conurile" sunt specializate in vederea diurna, sunt sensibile si diferentiate pe culori, ofera o foarte mare rezolutie (sensibilitate la detalii) si sunt concentrate in zona centrala a retinei. "Bastonasele" sunt specializate in vederea in penumbra, sunt sensibile la stralucire nu la culoare, sunt distribuite pe toata retina, sunt utilizate in special pentru vederea periferica si ofera o rezolutie mai redusa. "Bastonasele" (75 - 50 milioane) sunt mult mai numeroase decat "conurile" (6 - 7 milioane), dar au conexiuni pe grupe de senzori si nu individuale ca acestea din urma. Acest tip diferit de conectare este o justificare a rezolutiilor diferite oferite de cele doua grupe de senzori. In apropierea locului de conectare a nervului optic la retina exista o zona lipsita de senzori, zona oarba. Creierul este capabil sa completeze cu informatie, prin extrapolare, portiunea corespunzatoare din imagine astfel incat noi aflam despre aceasta problema din carti si nu o sesizam direct. Modalitatea a fost imprumutata la fabricarea senzorilor electronici cand pentru a nu arunca un senzor care are milioane de celule individuale se completeaza informatia aferenta celor catorva celule individuale defecte cu informatia memorata in celule aditionale de memorie.
Zona cu cea mai mare sensibilitate de pe retina este zona centrala unde sunt concentrate cele mai multe "conuri". Aceasta zona (fovea) are o forma aproximativ circulara cu o raza mai mica de mm (aproximativ 0,75 mm). Pentru a putea face o comparatie cu senzorii electronici, o putem echivala cu o zona dreptunghiulara de mm x 5 mm care pastreaza raportul de 4/3 intre dimensiuni.
Daca acceptam ca densitatea "conurilor" in aceasta zona este de aproximativ 50000 de elemente pe mm , atunci obtinem un senzor echivalent de 265000 de elemente. Daca luam in considerare un senzor comun CCD care are o rezolutie de 756 x 58 vom gasi un numar mai mare de celule individuale, distribuite si pe o suprafata mai mare. Cum la nivelul tehnologic al anului 2001 exista senzori cu mai multe milioane de celule individuale putem concluziona ca ochiul omenesc nu depaseste acesti senzori nici ca numar absolut de celule nici ca densitate pe unitatea de suprafata.
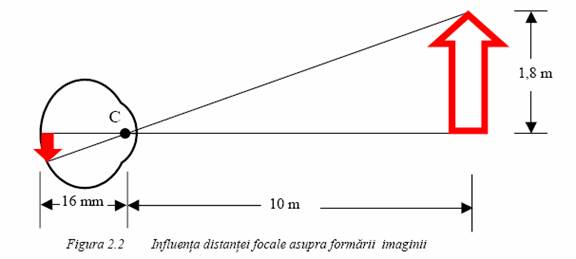
Distanta dintre centrul focal al lentilei si retina variaza intre 4 mm si 7 mm, dupa cum se focalizeza asupra unor obiecte mai apropiate sau mai departate ceea ce conduce la deformarea lentilei [ ]. Ca urmare un om de m privit de la 0 m distanta va crea o imagine de aproximativ 5 mm (figura 2).
Sistemul vizual uman reuseste sa ofere o capacitate foarte mare de adaptare elativ la limitele inferioara si superioara acceptabile pentru intensitatea luminii incidente pe ochi (aceste limite se afla intr-un raport de ). Acest lucru este justificat de caracteristica logaritmica a ochiului (stralucirea subiectiva este o functie logaritmica de intensitatea luminii incidente pe ochi), dar trebuie facuta precizarea ca sistemul are nevoie de un timp de adaptare la trecerea de la un nivel de iluminare la un altul mult diferit. Sistemul vizual uman poate sesiza numai aproximativ 20 de schimbari in stralucirea unei zone mici dintr-o imagine, iar pentru intreaga imagine sunt necesare in jur de 00 de nivele de gri pentru ca aceasta sa fie apreciata ca realista. Capacitatea sistemului vizual uman de a distinge detalii (rezolutia spatiala) este limitata de marimea celelor individuale, a "conurilor" si "bastonaselor". Este evident ca nu se pot sesiza detalii mai mici decat dimensiunea unei astfel de celule. Obiectele mai mici pot genera o imagine de aceeasi marime daca sunt privite de la o distanta mai mica. Rezolutia spatiala depinde de conditiile de iluminare, creste cu nivelul stralucirii si este mai mare pentru imaginile monocrome.
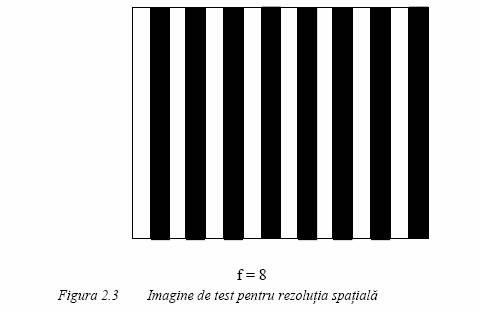
Rezolutia spatiala (care poate fi definita si drept capacitatea de a separa doi pixeli vecini dintr-o imagine) este un concept legat frecventa spatiala. Daca privim o imagine formata din benzi verticale negre pe fond alb (figura 3) atunci se pune problema cate astfel de schimbari de stralucire putem sesiza. Este clar ca este important sa precizam si distanta de la care privim. Pentru a elimina efectul distantei putem calcula aceasta frecventa relativ la grad spatial din campul de vedere (marimea pumnului privit de la o distanta egala cu lungimea bratului intins este de aproximativ grad spatial). In aceste conditii se poate aprecia ca frecventa de taiere pentru sistemul vizual uman este in jur de 50 de ciclii (un ciclu este o schimbare completa in semnal) pe grad.
Pentru aprecierea perceptiei imaginilor in miscare se defineste raspunsul
temporal al sistemului vizual uman care este capacitatea sistemului de a raspunde
la informatia vizuala primita ca functie de timp. Ca o masura a performantelor,
putem preciza ca pentru o imagine afisata pe un monitor sistemul vizual uman nu
poate percepe constient palpairi (flicker) daca frecventa de afisare a cadrelor este
mai mare de 60 Hz.
Daca, intre anumite limite, fiziologia si aprecierea performantelor sistemului
senzorial de vedere uman sunt accesibile, mai dificila se arata posibilitatea de
intelegere a modului cum aceasta informatie este prelucrata si utilizata de sistemul
de prelucrare, care are ca element central creierul uman. Pe baza informatiei
vizuale, care reprezinta mai mult de 80% din totalul intrarilor senzoriale, omul
reuseste, intr-o prima etapa, sa identifice si sa localizeze obiectele din mediul
inconjurator. Desigur, intelegerea scenelor privite este o operatie mult mai
complexa si o putem defini ca totalitatea operatiilor care mai pot fi facute dupa
simpla clasificare a obiectelor.
Putem remarca faptul ca sistemul de vedere este integrat in sistemul global
care este omul. In sprijinul acestei afirmatii putem face o observatie interesanta
Pentru orice sistem de vedere este important sa poata localiza obiectele din spatiul
aplicatiei pe baza informatiei din imaginile achizitionate. Pentru vederea artificiala
realizarea acestei corespondente intre coordonatele globale si coordonatele imagine
se bazeaza pe o etapa initiala care se numeste calibrarea camerelor de luat vederi.
Calibrarea camerelor produce o matrice de transformare a coordonatelor. Aceasta
matrice este valabila atata timp cat pozitia si orientarea camerelor sunt fixe in
raport cu anumite repere de referinta. Este evident ca in creierul omului astfel de
corespondente nu pot fi realizate matriceal! Totusi plasarea celor doi senzori, care
sunt ochii, intr-o pozitie relativ fixa in raport cu scheletul nostru, si deci si cu
sistemele noastre de locomotie si manipulare, este o conditie care sustine abilitatea
noastra de a localiza si manipula corect obiectele. Pentru configuratia fixa care este
proprie fiecarui individ, corespondenta imagine - mediu inconjurator este invatata
si permite o foarte buna viteza de reactie. Daca incercati sa manipulati obiecte pe
baza unor imagini dintr-o oglinda sau achizitionate cu o camera TV si afisate pe un
monitor, veti avea dificultati si performante modeste. O noua corespondenta
imagine - mediu inconjurator trebuie construita si aceasta sarcina necesita un timp
de adaptare. Acesta este motivul pentru care nu ne asteptam la performante
remarcabile de la un sistem de vedere plasat in varful unor antene care se
orienteaza permanent, ca in filmele SF! Nici melcul nu este un vitezist!
Pentru sistemul de vedere uman putem face o apreciere generala a
performantelor pe care acesta le ofera
Masurarea distantelor este facuta calitativ, rezultand mai degraba informatii
de tipul "mai aproape", "mai departe", "mai scurt" sau "mai lung" decat
dimensiuni exprimate in unitati de masura. Va puteti convinge incercand sa
apreciati dimensiunile obiectelor din jurul dumneavoastra, in centimetrii. In mod
normal veti avea aproximari de circa 0%. Nu avem in vedere iluziile optice care
pot fii induse prin diferite mici trucuri.
Sesiziarea detaliiilor tridimensionale (relief) este foarte buna
Aprecierea directei (orientarea muchiilor) este buna si se face tot calitativ si
nu cantitaiv.
Achizitia si prelucrarea imaginilor in miscare se face cu o viteza mai mare de
0 imagini intr-o secunda Este o viteza apreciata ca timp real relativ la actiunile
(de exemplu deplasare, manipulare, supraveghere) pe care le poate intreprinde o
persoana
Sesizarea contururilor obiectelor se face cu foarte buna precizie.
Rezolutia (sesizarea detaliilor) este foarte buna si este superioara rezolutiei
asteptate in raport cu numarul celulelor vizuale individuale.
Culoarea este perceputa in banda de lungimi de unda 400 nm - 800 nm.
3.3 CCD
Senzorii CCD (Charge coupled devices) [ 24][87][
capteaza lumina in mici fotocelule si si-au primit numele de la modul in care
sarcinile sunt citite dupa expunere. Pentru aceasta (figura 9), mai intai sarcinile
din prima linie sunt transferate intr-un registru de citire. De acolo, semnalele sunt
preluate de un amplificator si ulterior de un convertor analog - numeric. Dupa ce o
linie a fost citita, sarcinile ei din registrul de citire sunt sterse. Urmatoarea linie va
fi transferata in registrul de citire, iar toate liniile sunt transferate cu o linie mai jos.
Sarcinile din fiecare linie sunt cuplate astfel incat la fiecare transfer din linia
curenta in linia urmatoarea are loc si un transfer din linia precedenta in linia
curenta. In acest mod se poate citi o linie intreaga la un moment dat.Tehnologia
CCD are acum 35 de ani si foloseste un proces specializa VLSI bazat pe crearea
unei retele de electrozi de siliciu pe suprafata cipului. Nodurile retelei sunt atat de
mici si de apropiate incat permit pastrarea electronilor pana cand acestia sunt
mutati fizic pana din pozitia in care lumina incidenta i-a generat, de-a lungul
suprafetei cipului, pana la un amplificator de iesire. Pentru a realiza acest proces,
reteaua de electrozi este comandata de un ceas extern senzorului. Din punct de
vedere tehnic este posibili, dar nu este rentabil din punct de vedere economic sa se
integreze in tehnologia CCD alte functii necesare functionarii camerei, cum ar fi
circuite de ceas, logica de secventiere, procesare de semnale etc. Aceste functii
sunt, in mod normal, implementate in alt cip. In acest fel se ajunge la solutii tehnice

care presupun intre 3 si 8 cipuri. Un alt punct nevralgic al tehnologiei CCD este
necesitatea semnalelor de ceas cu o amplitudine si de o forma impuse care
influenteaza decisiv performantele finale ale sistemului Un cip specializat care sa
genereze semnale corecte de ceas, ca forma si amplitudine, necesita tensiuni de
alimentare nestandardizate si creste puterea consumata. Plecand de la o singura
tensiune de alimentare, pentru a genera 5 sau 6 semnale diferite de alimentare, este
nevoie de cateva regulatoare interne care evident cresc complexitatea solutiei.
Aceste inconveniente sunt pretul platit pentru o imagine de foarte buna calitate.
Din punct de vedere istoric, tehnologia CCD a fost dezvoltata cautand solutii
pentru alte probleme decat achizitia imaginilor. In anii 960 calculatoarele nu
dispuneau de sisteme de memorie ieftine si de mare dimensiune. Laboratoarele Bell
au propus tehnologia CCD ca o modalitate de stocare de date. In 974 Fairchaild
Electronics au produs primul senzor de imagine CCD cu un format de 00 x
pixeli, iar in 975 s-a produs prima camera comerciala bazata pe aceasta
tehnologie. Tot atunci Kurzweil Computer Products a realizat primul scaner bazat
pe un senzor liniar CCD de 500 pixeli de la Fairchaild.
Exista patru tipuri de baza pentru senzorii CCD:
Liniari,
Interliniari,
Cadru intreg (full frame),
Transfer pe cadre (frame transfer).
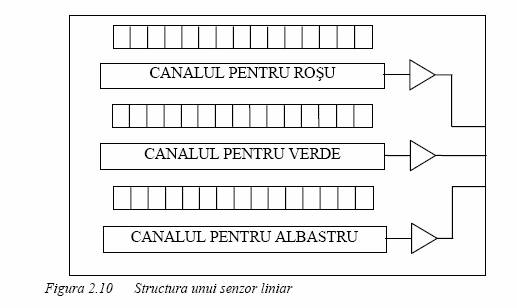
Un senzor CCD liniar (figura 0) este alcatuit dintr-un sir de senzori
dispusi pe o singura linie. Pentru a achizitiona o imagine folosind un senzor liniar
este necesar ca senzorul sa se deplaseze cu viteza controlata de-a lungul imagini.
Viteza de achizitie este redusa daca se foloseste aceasta maniera. Structura
electromecanica care asigura deplasarea se bazeaza pe motoare pas cu pas si creste,
pe de o parte complexitatea sistemului, iar pe de alta parte riscul de alterare a
geometriei imaginii. Utilizarea actuala a senzorilor liniari se concetreaza in
fabricatia scanerelor si a cititoarelor de coduri cu bare.
Celelalte trei variante de senzori sunt considerate generic ca senzori
matriceali CCD pentru ca formeaza zone senzoriale cu linii si coloane, de forma
dreptunghiulare sau patrate.
Un senzor CCD cu transfer interliniar (figura ) are pentru fiecare pixel si
un fotodetector si o zona de stocare a sarcinii rezultate. Zona de stocare este
formata prin ecranarea (opacizarea) unei parti din zona pixelului. Prin concatenarea
zonelor opace se formeaza un canal vertical care permite transferul sarcinilor de-a
lungul senzorului pana la un registru orizontal de deplasare. Prin modul de
functionare varianta interliniara permite transferul rapid al sarcinilor din zona in
care au fost acumulate sub influenta luminii mai intai in zonele opace de stocare,
iar ulterior din linie in linie pana la registrul orizontal de deplasare. Prin deplasarea
vechilor sarcinilor se lasa loc pentru noilor sarcini acumulate ceea ce este un suport
deosebit pentru achizitia de secvente video. Prin prezenta zonelor de stocare si
transfer se micsoreaza zona din senzor care este efectiv sensibila la lumina. Desi
este o complicatie din punct de vedere al fabricatiei, se poate recurge la atasarea de
microlentile pentru pixeli. Aceste microlentile au rolul de a concentra lumina de pe
o zona mai mare decat zona efectiv fotosensibila a senzorului.
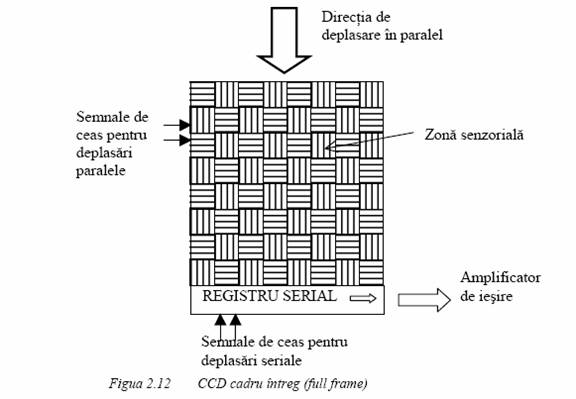
Senzorii CCD de tip cadru intreg (figura 2) folosesc toata zona pixelului
pentru achizitia imaginii. In acest fel pe timpul transferului de sarcini nu se mai
poate face integrare, deci nu se mai poate face acumulare de sarcini prin expunerea
la lumina. Pentru a impiedica influenta luminii pe timpul cat are loc transferul de
sarcini (ceea ar strica calitatea imaginii) se pot plasa diafragme mecanice in fata
senzorilor. Exista si situatii in care aplicatia, prin natura ei, elimina necesitatea
diafragmei mecanice, ca de exemplu atunci cand durata si volumul luminii este
controlat extern prin lumina stroboscopica de studio.

Varianta cu transfer pe cadre este similara cu varianta cadru intreg, dar se
ecraneaza (mascheaza) jumatate din matricea senzoriala astfel incat sa fie apta
pentru stocarea sarcinilor. Dupa terminarea perioadei de integrare, cand elementele
senzoriale elementare au inmagazinat sarcinile, are loc un transfer al sarcinilor
catre zona de stocare si ca urmare o noua integrare se poate face fara o intarziere
expresa. In acest mod, acest tip de senzori se pot folosi pentru achizitii rapide.
Totusi, suprapunerea perioadelor de integrare cu acelea de transfer de sarcini
conduce la o scadere a calitatii imaginii (smear). Pretul de cost al acestor senzori
este crescut datorita complexitatii induse de prezenta celor doua zone, senzoriale si
de stocare. Varianta interliniara reprezinta, din acest punct de vedere, o
imbunatatire pentru ca se permite integrarea si transferul simultane, fara efectul de
murdarire a imaginii.
Pentru citirea datelor din senzor se folosesc doua metode:
Citire progresiva
Citire intretesuta
Intr-un mod analog cu baleiajul video, si aici conteaza ordinea in care
coloanele senzorului sunt transferate in registrul orizontal si ulterior la iesirea din
senzor. In varianta progresiva, liniile se citesc succesiv in ordinea in care apar in
imagine. In varianta intretesuta, se citesc intai liniile pare si ulterior liniile impare,
dupa care are loc reintegrarea. Pentru senzorii mai mari de Mpix cea mai
frecventa metoda este aceea intretesuta in care un rand de electrozi controleaza
transferul vertical al sarcinilor din doua randuri de pixeli.
Pentru ca exista un numar mare de producatori si o competitie dura pe piata
exista si multe soluti de proiectare diferite care incearca, fiecare in parte, diferite
avantaje. Exemplificam in continuare.
ce ajuta la cresterea densitatii de pixeli si la marirea zonei fotosensibile.
Producatorii sustin ca senzorul lor are si un raport semnal - zgomot si o gama
dinamica mai bune. Ideal ar fi sa avem senzori cu calitatea imaginii ca la CCD si
cu versatilitatea de la CMOS. Desi acest lucru nu este posibil, Kodak a proiectat un
senzor CCD cu transfer interliniar care face unele prelucrari de imagini in cip prin
adaugarea unor ceasuri pentru esationare dublu corelata. Se poate calcula astfel
curentul de intuneric (care apare in lipsa luminii) si acesta se poate scade din
imaginea obtinuta in prezenta luminii. Philips (ca si Sanyo) a proiectat o tehnologie
de transfer pe cadre numita True Frame Sensor Architecture. Opacizarea zonei de
stocare se face cu un ecran metalic si poate inmagazina numai aproximativ /5 din
capacitatea totala a pixelului. Senzorul este folosit astfel numai pentru analiza
scenei in vederea determinarii parametrilor de reglaj si pentru vizualizarea scenei.
Cand camera este intr-unul din aceste moduri de lucru, electronii sunt trimisi rapid
in zona de stocare cu pierderea a 4/5 dintre ei. In modul normal de lucru toti
electronii sunt cititi rapid fara a fi trimisi in zona de stocare. Metoda de citire este
mai degraba progresiva decat intretesuta, iar principalul avantaj al acestei tehnici
este viteza de lucru pe care producatori o apreciaza la 30-60 fps.
3.4 CMOS
CMOS este, ca si CCD, o tehnologie pe baza de siliciu si are proprietati
fundamentale relativ similare din punct de vedere al sensitivitatii in spectrul vizibil
si aproape de infrarosu [ 42][206][207]. Ambele tehnologii
convertesc lumina incidenta sub forma de fotoni in sarcini electrice sub forma de
electroni. Senzorii color pot fi fabricati in ambele tehnologii, in mod normal, prin
adaugarea la fiecare pixel a unor filtre de culoare (de exemplu rosu, verde si
albastru). Tehnologia CMOS este o tehnologie de tip semiconductor metal - oxid si
este arhitectura cea mai folosita pentru tehnica de calcul, unitati centrale si module
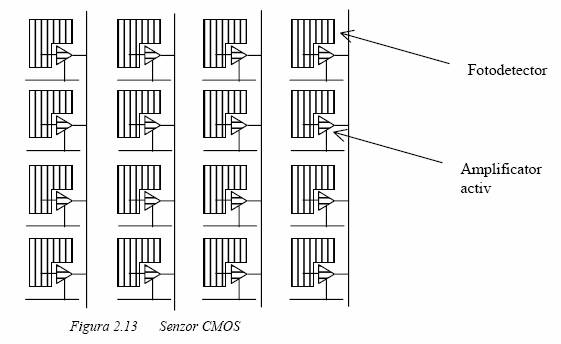
de memorie. Senzorii de imagine CMOS (figura 3) performanti folosesc tehnica
APS (active pixel) care a fost dezvoltata la NASA Jet Propulsion Laboratory la
mijlocul anilor
Senzorii CCD sunt produsi pe linii de fabricatie specializate pe care nu se
pot produce alte circuite integrate ceea ce creste pretul de cost. Alte linii de
fabricatie folosesc tehnologia CMOS Complementary Metal Oxide Semiconductor
pentru circuite integrate pentru procesoare si memorii. De exemplu procesorul
Pentium III contine 0 milioane de elemente active de acest tip. Fabricand senzori
de imagine pe astfel de linii de fabricatie conduce la scaderea importanta a costului.
Trebuie precizat ca aici termenul CMOS se refera la modalitatea de fabricatie si nu
la o tehnologie specifica pentru senzori.
Exista doua variante de baza pentru senzorii de imagine CMOS:
Pasivi
Activi.
PPS (Passive pixel sensors) a fost prima varianta dezvoltata in anii La
nivelul zonelor fotosensibile lumina sub forma de fotoni este convertita in sarcini,
adica electroni. Sarcina acumulata pe timpul expunerii, integrarii, este citita si
amplificata. Senzorii sunt mici, atat cat sa permita expunerea zonei fotosensibile si
sa includa conexiunile. Problema majora o constituie, la acest tip se senzori,
zgomotul materializat intr-o retea pe fundalul imaginii. Pentru a inlatura acest
zgomot de fond sunt necesare etape de prelucrare suplimentare.
APS (Active pixel sensors) reduce exact zgomotul amintit pentru varianta
pasiva. Circuite specializate la nivelul fiecarui pixel determina si anuleaza
zgomotul aparut. De la aceste circuite active vine si numele tehnologiei.
Performatele acestei variante de tehnologie CMOS se apropie de performatele
oferite de tehnologia CCD si permit realizarea de senzori de mare dimensiune si
inalta rezolutie.
Tehnologia CMOS permite includerea in cipul senzorului a unor functii
suplimentare (inclusiv pentru micsorarea jitterului si stabilizarea imaginii sau
compresia imaginii, pe langa cele amintite anterior) care necesita cipuri
suplimentare la CCD. In aceasta tehnologie se poate comuta rapid intre achizitia de
imagini (fotografii) si achizitia de secvente video (filme). Trebuie subliniat ca in
acest ultim caz ramane de rezolvat, la nivelul calculatorului cu care este cuplata
camera, problema memorarii in timp real a volumului mare de informatie asociat
secventelor video. Prin prezenta circuitelor suplimentare de eliminare a zgomotelor
se micsoreaza procentul zonelor influentate de lumina din suprafata totala a
circuitului (fill factor - procentul de acoperire). In acest fel sensitivitatea la lumina
scade si apar probleme legate de calitatea imaaginilor achizitionate in conditii de
lumina putina. Situatia se poate corecta, extern, prin prezenta surselor de lumina de
tip flash si prin marirea timpului de expunere. Din punct de vedere tehnologic,
intern, se recurge la introducerea de microlentile pentru fiecare pixel, pentru a
aduna mai multa lumina si la reducerea circuitelor suplimentare.
Pentru ca senzorii CMOS au un nivel de zgomot mai mare decat senzorii
CCD este nevoie de un timp de procesare mai mare intre doua imagini. Se pot
folosi pentru aceasta procesoare de semnal (DSP) specilizate. Pretul este un avantaj
major pentru CMOS ceea ce determina tendinta de a indrepta cercetarile in directia
producerii unor astfel de senzori si de a le imbunatatii performantele
3.5 Comparatie CCD - CMOS
In ultimii ani ai celui de-al doilea mileniu s-au vandut mai multe unitati CCD
decat CMOS, dar ca proiecte de noi produse, in acelasi an, raportul a fost de 5 la
pentru CMOS, daca nu mai mult. CCD are niste avantaje tehnice [207][209] care
pot fi grupate in patru grupe care vor fi prezentate in continuare.
Expunerea simultana
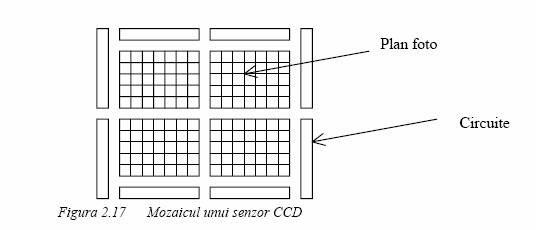
Tehnologia CCD are doua elemente constitutive principale (figura
planul foto,
memoria asociata
Secventa de actiuni parcursa in functionarea senzorului este urmatoarea:
expunerea planului video,
transferul rapid in memoria asociata
citirea din memorie, cate o linie odata
in timp ce memoria este citita, planul foto este expus pentru urmatorul cadru.
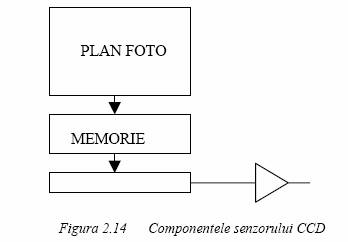
Expunerea simultana a tuturor pixelilor este un avantaj important; iar
dezavantajul este structura mai complicata prin prezenta memoriei.
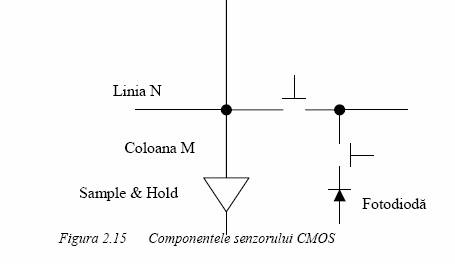
CMOS presupune o secventa mult mai simpla
Se expune o linie cat timp este necesar pentru a fi oferita la iesire,
Aceasta linie este transferata in registrul de iesire.
Avantajul unei astfel de structuri este simplitatea, iar dezavantajul este ca nu
toti pixelii sunt expusi simultan, in acelasi timp.
In tehnologia CCD (figura 5) sarcinile se deplaseaza de la un pixel la
vecinul sau pentru a fi citite. La CMOS, varianta APS, (APS - Active Pixel Senzor)
fiecare pixel are propriul amplificator si circuit de iesire deci poate fi citit
independent ceea ce conduce la posibilitatea unor frecvente de baleiaj vertical,
cadre pe secunda, variabile (se poate selecta o regiune de interes din imagine).
Fiecare amplificator necesita 3 tranzistoare FET. Practic amplificatoarele au
amplificari si offseturi usor diferite ceea ce conduce la aparitia unui zgomot fix pe
imagine (FPN - Fixed Pattern Noise). Problema amplificarii se poate corecta cu o
unitate specializata pentru fiecare pixel (UGA - Unity Gain Amplifier) care
foloseste o tabela cu factori de corectie pentru amplificari. In acest mod apar 6
tranzistoare FET in plus ceea ce reduce zona activa a senzorului si creste pretul. Se
foloseste o tehnica speciala de reducere a redundantei (ACS - Active Column
Sensor) care micsoreaza numarul tranzistoarelor care au acelasi rol si introduce un
singur tranzistor FET la intrarea UGA pentru o coloana. Problema offsetului
(decalajului) se poate rezolva prin masurarea valorii initiale a fiecarui pixel si
scaderea acesteia din valoarea de dupa expunere, in interiorul circuitului integrat
(on-cip) sau in afara lui (off-cip). In majoritatea cazurilor se utilizeaza varianta offcip
ca si pentru problema amplificarii, ceea ce creste complexitatea abordarii. ACS
are avantajul folosirii unui singur tact si a unei singure tensiuni de alimentare, in
timp ce la tehnologia CCD sunt necesare mai multe tacte si mai multe tensiuni de
alimentare. In ambele tehnologii, folosind timpi de integrare (expunere a senzorului
la lumina) mici, se poate elimina "blur"-ul si se poate "ingheta" imaginea.
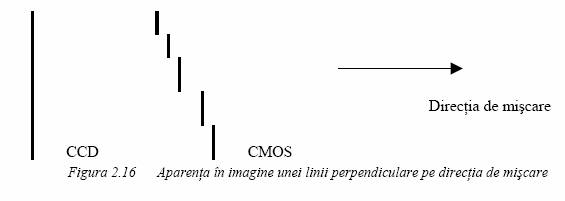
Diferenta dintre cele doua tehnologii apare in cazul imaginilor cu linii
verticale care se misca rapid. Datorita expunerii linie cu linie, senzorul CMOS risca
sa prezinte aceste linii fragmentate (figura 6). Acest aspect are o deosebita
importanta in aplicatiile industriale si stiintifice bazate pe vedere artificiala
(computer vision, machine vision). Uneori aceasta deficienta se poate corecta prin
program cu pierderea de timp de prelucrare inevitabila
Zgomot foarte redus
In aplicatiile cu imagini in miscare rapida e nevoie de un timp de integrare
foarte mic pentru a elimina blur-ul. Timpul mic de expunere cere un zgomot de
fond foarte mic pentru a asigura o foarte buna gama dinamica. CCD realizeaza
acest deziderat nu numai la timpi de integrare mici, dar si la expuneri de ordinul
minutelor
CCD foloseste doua tehnici:
Racirea termoelectronica a senzorului la -30F -50F (-35 C -45o C). CCD se
bazeaza pe captura electronilor liberi pentru ca substratul rece reduce mobilitatea
electronilor si deci zgomotul de fond.
Subtierea substratului si iluminarea lui din spate pentru a impiedica aparitia
electronilor rebeli. Aceasta tehnica este utilizata in aplicatii de astronomie,
medicina si biologie.
Integrare intarziata in timp (TDI - Time Delay Integration)
Se foloseste o tehnica de scanare (parcurgere, baleiere) a senzorului pe linii.
CCD sustine aceasta tehnica pentru ca lucreaza cu acumularea unui singur electron
la un moment dat la un pixel. Se expune scurt, se genereaza doar cativa electroni,
sarcina acumulata este deplasata pe o linie si imaginea este reluata. Astfel se poate
face o sumare, pixel cu pixel, in timp ce imaginea isi schimba pozitia. Este
necesara deplasarea rezultatului electronilor acumulati, sincron cu miscarea
imaginii. Tehnica se dovedeste utila in cazul miscarii obiectelor in lumina putina
din aplicatii de fabricatie cu benzi si conveioare.
Mozaic
Avantajele oferite de tehnologia CCD si prezentate pana acum sunt legate de
operatiile la nivel de pixel. CCD permite si construirea unui mozaic (figura
prin alaturarea zonelor din senzor in suprafete mai mari, pe 3 sau 4 parti ale
senzorului
In concluzie, tehnologia CCD ofera avantaje care decurg din modul in care
functioneaza acest tip de senzor. Avantajele sunt importante in aplicatii militare,
stiintifice si industriale, dar mai putin sesizabile pentru consumatorul obisnuit.
CMOS e mai ieftin si se poate impune cand va da performante asemanatoare.
Trebuie facuta o diferenta intre aparatele foto, pentru fotografii, si camerele
video, pentru filme. Aparatele fotografice numerice sunt capabile sa achizitioneze o
imagine de mare rezolutie pe care o depun in format numeric pe un suport de
memorie (modul de memorie - stick, disc flexibil - floppy sau disc compact - CD).
Ca o functie suplimentara se ofera posibilitatea de a achizitiona o secventa scurta
formata din cateva cadre succesive. Camerele video achizitioneaza imagini cel
putin in cadenta TV de 20 sau 30 de imagini intr-o secunda. Imaginile, in format
analogic sau numeric, sunt depuse pe banda magnetica. Intrebarea este de ce, atatia
ani, nu s-au produs nici aparate foto care sa faca filme si nici camere video care sa
faca fotografii? Explicatia tehnica consta in imposibilitatea de realiza simultan cele
doua deziderate: rezolutia mare pentru detalii si numarul mare de imagini pe
secunda pentru imaginile in miscare. In momentul cand aceste limite tehnice vor fi
fost depasite vor interveni si criterii economice de satisfacere cu profit maxim a
cerintelor de piata care nu vor permite trecerea brusca la un numar prea mare de
aparate care sa faca simultan si fotografii si filme. In anii de la sfarsitul celui de-al
doilea mileniu solutia cea mai raspandita pentru aplicatii stiintifice si industriale
erau camerele 768 x 484 x 30 cadre/secunda. Pentru anul 2000 s-a considerat
interesanta solutia senzorilor cu ,3 megapixeli (Mpix) la 2 fps (frames per
second - cadre/secunda). La nivelul anului 2000 segmentul de vanzari al aparatelor
de fotografiat si al camerelor video cuprindea in ordine camere analogice
(imaginile sunt memorate pe banda, in format analogic), inclusiv cele cu trei cipuri,
camere numerice cu rezolutii de ordinul megapixelilor si 0-30 fps, camere de 2
Mpix la -4 fps, cateva camere de 4-6 Mpix. Ulterior balanta s-a inclinat net in
favoarea camerelor numerice, care inregistreaza imaginile in format numeric pe
suportul de memorie. In ultimii ani CCD a fost leader in domeniul megapixelilor,
dar in anii urmatori se asteapta CMOS la cativa megapixeli.
CMOS se poate produce pe liniile obisnuite de circuite integrate, ceea ce ii
scade pretul in comparatie cu CCD care necesita conditii speciale de fabricatie si
are o rata de defecte la fabricatie mai mare. Din acelasi motiv CMOS poate include
mai usor in cip circuitele aditionale: convertoare analog - numeric (ADC - Analog
Digital Converter), procesoare numerice de semnal (DSP - Digital Signal
Processor).
5 Caracteristicile camerelor de luat vederi
Pentru a exemplifica parametrii care caracterizeaza functionarea unei
camere de luat vederi [206][207][209] am ales camera Pulnix CCD TMC-6
RGB.
Camera este prezentata de producator ca o camera de inalta rezolutie
pentru aplicatii cu imagini color. Este recomandata pentru aplicatii de
teleconferinta, aplicatii industriale bazate pe vedere artificiala (machine
vision), recunoastere de obiecte, cercetare medicala si supraveghere video.
Putem comenta totusi, analizand caracteristicile specificate de producator,
ca pentru aplicatii de videoconferinta sau supraveghere video uzuale aceasta
camera este o solutie prea performanta si deci prea scumpa. Se permite
expunerea senzorului pentru un timp mai mare decat perioada TV normala
ms corespunzator la 60 Hz sau 20 ms corespunzator la 50 Hz) ceea ce este util
pentru aplicatii cu lumina putina, cum sunt cele de microscopie. Se ofera o
tehnologie proprie de control al timpului de expunere care sa garanteze imagini de
buna calitate si pentru scenele in miscare rapida
Discutam in continuare informatiile furnizate in foaia de catalog a acestei
camere
Imager /2'' interline transfer CCD (6.4 mm x 4.8 mm)"
6.4 mm x 4.8 mm sunt dimensiunile senzorului. Observam ca aceste
dimensiuni sunt in raportul 3/4.
Echipamentele de afisare video si cele senzoriale au fost puse in legatura cu
cu formatul campului vizual uman. Numai daca ne gandim ca posedam doi ochi
dispusi pe orizontala, putem intelege ca avem un camp vizual mai mult lat decat
inalt. Pe de alta parte, tehnologiile bazate pe baleiaj ar fi fost favorizate de formate
de imagine, daca nu circulare, macar patrate. In acest fel s-ar fi asigurat distante
egale de la tunul de electroni pana la punctele de pe suprafatele de afisare,
respectiv senzoriale. Ca un compromis, s-a ales formatul de imagine cu un raport
de 3/4 intre dimensiunile verticala si respectiv orizontala. Au aparut astfel, dar au
fost rezolvate, probleme de corectare a geometriei imaginii, mai ales in colturile ei.
Totusi, este cunoscut ca atunci cand testam, de exemplu, calitatea imaginii afisate
pe un display de calculator, zonele in care ne putem astepta la deteriorari ale
calitatii imaginii sunt tocmai cele mentionate mai sus. Remarcam ca acest raport sa
pastrat si pentru formatele numerice standardizate 640 x 480, 024 x 768, 600 x
200 etc. Ulterior, tehnologiile electronice au facut posibila latirea imaginii catre
rapoarte mai mici, deci mai adaptate campului vizual uman.
Este specificata aici si tehnologia electronica de fabricare a senzorului, CCD
(Coupled Charge Divaice) si tehnica de citire a sarcinilor: transfer interliniar.
Tehnologia CCD este cea mai raspandita tehnologie de fabricatie a senzorilor de
imagine. Senzorul este organizat pe perechi de coloane, una expusa luminii si
cealalta opaca. Dupa prima faza, timpul de expunere, intr-o a doua faza, se face
transferul sarcinilor acumulate dintr-o coloana in cealalta. Ulterior coloana opaca
care este defapt un registru de deplasare, este secvential transferata (de aici
termenul interliniar) intr-un registru de deplasare orizontal. Acest registru va
furniza imaginea linie cu linie.
Pixels 752(H) x 582(V)"
Se precizeaza aici numarul de linii, 582, si numarul de coloane, 752, al
matricei senzoriale. Se observa ca raportul dintre aceste numere este doar
aproximativ 3/4. Acest lucru se intampla pentru ca nu toate celulele disponibile
sunt folosite efectiv pentru imagine, pentru ca celula individuala nu este
intotdeauna patrata si pentru ca celulele sunt apropiate dar nu sunt adiacente. Ca
urmare, camera are un senzor de 437664 pixeli. Aici elementele imaginii, pixelii,
sunt celulele senzoriale individuale. Se poate remarca ca nu exista un raport de
corespondenta biunivoca intre pixelii senzorului si pixelii imaginii afisate. Intre
aceste doua reprezentari se interpun procesele de citire a senzorului, generare a
semnalului analogic si conversia anlog-numerica. Semnalele de ceas care
guverneaza aceste procese sunt responsabile de pastrarea geometriei imaginii.
Numarul de pixeli este parametrul cel mai important pentru definirea rezolutiei
oferite de senzorul camerei, indiferent de aplicatia in care este utilizata
Cell size 8.6 m (H) x 8.3 m (V)"
Se precizeaza dimensiunea celulei senzoriale individuale. Acest parametru
este necesar in tehnicile de calibrare a camerelor pentru aplicatii in care imaginile
sunt folosite pentru masurari dimensionale. Pentru o camera de video conferinta
sau pentru un aparat de fotografiat nu intereseaza un astfel de parametru si nici nu
este indicat, in majoritatea cazurilor, de catre producator. Dimensiunea totala a
senzorului nu coincide cu zona activa, aceea care percepe lumina. Daca inaltimea si
latimea senzorului, pe de o parte si numarul de linii si numarul de coloane, pe de
alta parte s-ar afla in raportul de 3/4 atunci ar fi convenabil sa avem o celula
senzoriala individuala patrata. Aceasta conditie este partial indeplinita in acest caz.
Colour filter Cy/Ye/Mg/G Complementary Colour Filter"
Anumite camere compun culoarea din cele trei nuante de baza RGB, Red,
Green, Blue respectiv rosu, verde si albastru. Alte camere diferentiaza culorile
complementare Cyan, Yellow, Mangeta. Pentru a diferentia culorile de baza sau pe
cele complementare se echipeaza celulele individuale cu filtre de culoare. Aparitia
a trei registrii orizontali de deplasare, de exemplu, este o solutie care permite
formarea unui semnal video care sa respecte unul din standardele consacrate si in

care semnalele de culoare apar intr-o ordine prestabilita. Un grafic suplimentar
oferit de producator (figura 23) da indicatii asupra sensibilitatii spectrale, in
functie de lungimea de unda, a senzorului. Dupa acest grafic aceasta camera este
mai sensibila in infrarosu (partea din dreapta a graficului) decat ochiul omului. Ca
urmare este de asteptat ca aceasta camera sa "vada" emisia unei telecomenzi TV,
ceea ce noi nu reusim. Exista si situatii in care o sensibilitate crescuta in zona de
infrarosu sa nu fie dorita pentru ca se doreste obtinerea de imagini care corespund
numai spectrului vizibil din punct de vedere uman.
Scanning 2: Interlace, field mode scanning 625 line 50 Hz"
Modalitatea de afisare a imaginilor pe tuburile catodice se bazeaza pe viteza
limitata de reactie a sistemului vizual uman. Imaginea este baleiata de la stanga la
dreapta si de sus in jos cu o viteza atat de mare astfel incat sa se formeze suficient
de multe cadre intr-o secunda pentru ca ochiul uman sa perceapa o imagine stabila
fara palpairi.
Dispozitivele electronice utilizate atunci cand s-au impus standardele de
televiziune (primul utilizator major al imaginilor) nu permiteau realizarea unei
astfel de viteze de baleiere. S-a recurs la un truc, se baleiaza imaginea pe rand, pe
liniile impare (care formeaza semicadrul impar) si pe liniile pare (care formeaza
semicadrul par). Aceasta maniera se numeste baleiere intretesuta. Evolutia
ulterioara a performantelor circuitelor electronice a inlaturat necesitatea baleiajului
intretesut, dar datorita raspandirii foarte mari acesta este inca folosit.
Specificatia din foaia de catalog se refera, in mod analog, la maniera de
baleiere a senzorului (imaginea se preia nu se afiseaza). Se indica faptul ca
semnalul furnizat de camera respecta standardul (CCIR pentru Europa) cu
imaginea impartita pe doua semicadre, cu 625 linii pentru un cadru si 50 de
semicadre (in fapt 25 de imagini intregi) pe secunda. Nu toate cele 625 linii fac
parte din imaginea efectiva, un numar de linii sunt necesare pentru revenirea
baleierii din dreapta jos pana in stanga sus. Alt standard (RS- 70 pentru SUA si
Japonia) micsoreaza numarul de linii la 525 linii pentru o imagine si mareste
numarul de semicadre pe secunda 60. Se pierde din rezolutia spatiala, dar creste
calitatea redarii imaginilor in miscare.
Sync fH = 5.625 KHz, fV= 50.000 Hz internal sync only (Ex version for
external sync)"
Se specifica frecventele de sincronizare cu care lucreaza camera. Numarul de
linii pe secunda este frecventa baleiajului orizontal (H), sau frecventa de linii, si se
obtine multiplicand numarul de cadre cu numarul de linii dintr-un cadru: 25 x 625
5625. In varianta alternativa mentionata mai sus s-ar fi obtinut o valoare
apropiata: 30 x 525 = 5750. Numarul de semicadre pe secunda se numeste
frecventa de baleiaj vertical (V) sau frecventa de cadre. Aceasta camera nu poate fi
sincronizata cu un semnal de ceas furnizat din exterior, dar exista alta varianta
constructiva, marcata cu indicativul EX, care are aceasta facilitate.
TV resolution 450(H) x 450(V) TV lines"
Asa cum am mentionat deja, numarul de pixeli este un parametru
determinant pentru rezolutia imaginii oferite de senzor. Totusi si alti parametrii
infuenteaza calitatea semnalului camerei (de exemplu tehnologia senzorului,
tehnologia si schemele de interconectare pentru celelalte componente electronice
ale camerei, standardul TV respectat). Este nevoie atunci de un indicator sintetic
care sa cuantifice calitatea imaginii finale oferite de camera. In mod frecvent se
utilizeaza, in acest sens, rezolutia exprimata in linii TV. Aici ni se garanteza ca
imaginea are o rezolutie echivalenta cu 450 linii TV atat pe orizontala (H) cat si pe
verticala (V). Este recomandat ca acest parametru sa fie folosit in special
comparativ pentru diferite produse si mai putin ca valoare absoluta. Pentru
aplicatiile stiintifice si industriale care presupun prelucrare si analiza automata de
imagini, nici nu intereseaza prea mult calitatea unei imagini afisate pe un ecran ci
intereseaza rezolutia imaginii numerice disponibile in memoria sistemului.
Remarcam ca exista o diferenta intre rezolutia senzorului si rezolutia TV. Fara a
intra in detaliile teoriei esantionarii semnalelor putem afirma ca rezolutia efectiva a
unui senzor matriceal nu poate fi decat aproximativ jumatate din numarul de celule
elementare pe fiecare directie. Pentru camerele cu tub aceasta rezolutie este data de
diametrul spotului de electroni relativ la marimea zonei fotosensibile. Pentru
evaluarea rezolutiei TV se foloseste un test standardizat (o mira de control), de
exemplu cel numit EIA Test Pattern. Din nefericire acest parametru nu presupune
utilizarea unor unitati de masura (mm sau inch) si deci poate deveni ambigu. Pentru
a face o astfel de conversie in linii pe milimetru, de exemplu, se pot folosi
formulele

Este evident ca .33" provine de la raportul 3/4 care trebuie luat in calcul
pentru ca spatierea difera astfel pe cele doua directii.
"S/N ratio 50 dB (AGC off)"
Un alt parametru care caracterizeaza calitatea semnalului oferit de camera
este raportul semnal zgomot. Calitatea superioara este evidentiata de valorile mari
ale acestui parametru pentru ca logaritmul este functie crescatoare, iar raportul
creste atunci cand creste numaratorul (semnalul) sau atunci cand scade numitorul
(zgomotul). Un prag acceptabil este valoarea de 40 dB, sub aceasta valoare
calitatea camerei devine absolut discutabila. AGC semnifica controlul automat al
amplificarii. Daca aceast functie este activa (on) ea permite marirea amplificarii
atunci cand semnalul este slab (lumina putina si respectiv, scaderea amplificarii
cand semnalul este prea puternic (lumina prea multa). Activarea AGC implica
activarea unor circuite electronice care sa controleze amplificarea ceea ce nu poate
avea ca efect decat scaderea raportului semnal-zgomot (orice circuit suplimentar
inseamna o sursa suplimentara de zgomot). Producatorul isi ia precautia de a
garanta raportul semnal/zgomot numai atunci cand AGC este inactivat.
"Min. ilumination 5 lux at F .4 (AGC on)"
Acest parametru da indicatii despre iluminarea minima care ii este necesara
camerei pentru a furniza o imagine acceptabila
Candela este unitatea de masura pentru intensitatea luminoasa. O candela
corespunde la intensitatea luminoasa a unei suprafete de /60 cm a unui radiator
negru aflat la temperatura de solidificare a platinei. Unitatea pentru fluxul luminos
este lumenul. Un lumen reprezinta fluxul luminos emis de o sursa punctuala cu
intensitatea de o candela de-a lungul unui unghi spatial de un steradian. Unitatea
pentru iluminare este luxul. Un lux reprezinta iluminarea corespunzatoare unui
lumen pe metru patrat.
Camerele mai sensibile sunt de nivelul sau 2 lux. Camerele pentru aplicatii
speciale (de exemplu imagini medicale endoscopice) sunt camere de fractiuni de
lux. Exista aplicatii in care este utila o oarecare insensibilitate, dar care permite si o
imunitate la zgomote. De exemplu intr-o aplicatie industriala cu vedere pentru
roboti poate fi preferabila o camera de 20 lux si iluminarea mai puternica a scenei
de operare.
Numarul f este o masura a volumului de lumina care poate trece printr-o
lentila. Valorile sunt o normalizare a deschiderii diafragmei lentilei. Numarul f este
definit ca raportul dintre distanta focala si diametrul deschiderii circulare a
diafragmei. Valorile standardizate sunt 6. Valorile sunt in
progresie geometrica cu ratia radical din . Fiecare avasare pe aceasta scara corespunde
reducerii la jumatate a suprafetei (care depinde patratic de raza) deschiderii
diafragmei si deci in aceeasi masura a volumului luminii care trece prin lentila
Este natural ca iluminarea minima necesara pentru camera sa depinda de volumul
de lumina care este lasat sa treaca prin lentila si aceasta este explicatia pentru care
se precizeaza si aceasta valoare. Valoarea de 5 lux va garanta o imagine acceptabila
numai daca se activeaza AGC, ceea ce in acest caz va determina o crestere a
amplificarii, cu o asteptata scadere a raportului semnal-zgomot.
"VBS & RGB (700 mV p-p)"
Camerele de luat vederi se cupleaza la sistemele de achizitie si prelucrare de
imagini sau la monitoarele TV. Cuplarea presupune ca semnalul de iesire al
camerei sa fie acceptat ca semnal de intrare de catre aceste sisteme sau monitoare.
Sunt doua probleme: standardul semnalului care determina in special frecventele si
modul de interpretare a semnalului, pe de o parte, si pe de alta parte nivelul de
tensiune al semnalului. Aici ni se indica ca este disponibil un semnal video
complex standard (VBS) si trei semnale separate pe culori RGB. Ambele au
valoarea varf la varf de 0.7 V. Aceste semnale impreuna cu cele de masa (GND) si
o sincronizare (SYNOUT) sunt disponibile in conectorul de iesire al camerei Daca
identificam pinul "video out" din acest conector (foaia de catalog include
intotdeauna o harta a pinilor, iar aici aceasta harta il indica ca fiind pinul 4) atunci
semnalul respectiv poate fi furnizat (evident al doilea fir este masa GND) intrarii
video a unui monitor sau televizor standard CCIR si imaginea se va "vedea", adica
se va sincroniza. Similar pentru un monitor TV cu intrari RGB analogice.
"AGC Max. 32 db, AGC, on-off switchable, manual gain control"
Producatorul specifica faptul ca AGC poate modifica amplificarea cu maxim
32 db si ca activarea/dezactivarea lui se poate face direct cu un comutator. Se poate
modifica si manual factorul de amplificare cu ajutorul unui semireglabil. Nu reiese
daca cele doua posibilitati de reglaj, comutatorul si semireglabilul, sunt disponibile
direct pe panoul camerei sau numai prin demontarea capacului camerei. Acest
lucru trebuie verificat direct.
"Gamma 0.45"
Intrarea senzorului este o distributie spatiala de lumina, iar iesirea lui este un
semnal electric (o tensiune) variabil in timp. Functia de baza a senzorului este
tocmai stabilirea unei anumite functii intre iesire si intrare. Aceasta dependenta este
descrisa in general ca o functie putere.
Amplitudinea iesirii = (Amplitudinea intrarii)a
Sau sub forma logaritmica
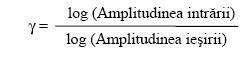
Un senzor liniar va avea valoarea . In majoritatea cazurilor senzorii CCD au
a ca valoare standard si ca valoare optionala a =0.45. Alegerea se face tot cu un
comutator de pe panoul camerei. Totusi, in cazul analizat, singura valoare
specificata de foaia de catalog este a
"Lens mount C/CS mount"
Camerele de luat vederei sunt furnizate, in majoritatea cazurilor, fara lentile.
Se presupune ca lentilele trebuie alese de catre utilizator in functie de aplicatia in
care doreste sa foloseasca respectiva camera. In functie de dimensiunea obiectelor
den scena si de distanta la care acestea sunt plasate fata de camera se va calcula
distanta focala a obiectivului. Monturile (dispozitivele mecanice de cuplare prin
filetare) camerelor sunt standardizate. Utilizatorul trebuie sa se asigure ca
obiectivul pe care il achizitioneaza are acelasi tip de montura cu camera. Aici se
precizeaza doua standarde: montura de tip C, la care distanta de la flansa la senzor
este de 7,5 mm, si montura de tip CS, la care distanta de la flansa la senzor este de
mm. Exista dispozitive mecanice suplimentare care pot face adaptarea chiar
intre monturi de tipuri diferite.
Desi aparent montura pare un element auxiliar neimportant, fie si prin natura
lui mecanica, totusi, mai ales pentru aplicatiile de masurare, aceasta are o influenta
foarte mare asupra rezultatelor finale. In aceste aplicatii intra in calcule distanta de
la flansa la senzor. Teoretic, axa care trece prin centrul lentilei si este
perpendiculara pe planul ei ar trebui sa intersecteze senzorul in centrul sau. Pozitia
astfel obtinuta poate fi definita ca originea imaginii. (Cum sa definim o astfel de
origine intr-o imagine cu un numar par de linii si coloane?!)
O alta problema apare atunci cand reglam distanta focala. Axa amintita mai
sus poate descrie o suprafata conica in spatiu si ca urmare centrul imaginii se poate
deplasa cu cativa pixeli. Este situatia in care lentila nu este tot timpul paralela cu
planul senzorului ca in cazul ideal.
"Power 2 Volt DC 450 mA"
Se specifica tensiunea de alimentare necesara 2 volti curent continuu, si
curentul consumat, 320 mA. Aceste valori sunt importante pentru a decide daca
putem alimenta camera folosind tensiunile disponibile in extensia de magistrala a
unui calculator care gazduieste placa de achizitie si prelucrare de imagini la care se
cupleaza camera, sau daca trebuie sa folosim un alimentator extern suplimentar.
Solutia folosirii unui semnal de alimentare disponibil in sistemul de calcul este mai
comoda, dar poate limita numarul de camere utilizabile pe care altfel placa de
achizitie si prelucrare de imagini le-ar putea suporta.
Exista deasemenea si riscul, pe care multi producatoril par sa-l ignore, de a
avea in acelasi conector semnale de alimentare si semnale video. Daca unul din
firele din conector se rupe, conform regulilor lui Murphy, probabilitatea ca un
eventual scurtcircuit sa se produca intre alimentare si un semnal video se apropie
de certitudine. Cum protejarea intrarilor si iesirilor video este dificila datorita
benzii de frecventa a semnalelor, urmarea este mai intotdeauna distrugerea unor
circuite. Folosirea unor conectori de calitate este, si din acest punct de vedere, o
cerinta importanta. In plus, este prudent sa nu deconectati sau sa conectati camerele
in timpul functionarii. Pentru camerele multimedia tensiunea de alimentare este de
cele mai multe ori 5 volti si alimentarea se face din calculator.
"Temp. range - o C to +50o C
Se precizeaza aici limitele de temperatura, dar nu se specifica, asa cum se fac
alti producatori, limitele pentru functionare, functionare cu garantarea
performantelor si depozitare. Pentru aplicatii speciale, aceste informatii pot deveni
utile
"Vibration and shock Vibration: 7G ( Hz to 2000 Hz) Shock: 70 G"
Exista aplicatii in care rezistenta la vibratii si socuri este esentiala. Putem
aminti ca exemplu camerele montate pe brate de robot, pe roboti mobili sau pe
avioane si rachete. "G" este acceleratia gravitationala m/s Pentru vibratii se
specifica acceleratia maxima si plaja de frecvente a acestor vibratii. Pentru soc se
precizeaza numai valoarea maxima a acceleratiei. Valoarile oferite de aceasta
camera sunt foarte bune si sustin afirmatia facuta initial ca aceasta camera este una
prea performanta si deci prea scumpa pentru aplicatii uzuale de videoconferinta si
supraveghere video.
"Size 42 x 32 x 32 mm"
Sunt evident dimensiunile geoemtrice ale camerei intr-o aproximare
paralelipipedica
"Weight 2 0 grams"
Se precizeaza greutatea camerei in grame. Aceasta informatie este utila in
special pentru includerea camerei intr-un sistem mobil, acolo unde o sarcina
suplimentara este limitata (de exemplu roboti mobili, minidirijabile
telecomandate). Daca aplicatia cere montarea camerei pe un suport reglabil, de
exemplu un trepied, atunci trebuie considerata si aici greutatea camerei. Din motive
comerciale producatorii de astfel de suporturi ofera produse diferentiate in functie
de greutatea suportata. Nu incercati sa plasati o camera putin mai grea decat
valoarea garantata de producatorii unor astfel de suporturi, chiar daca astfel ati face
o buna economie la pret, pentru ca s-ar putea sa aveti probleme de pozitionare
corecta
Daca pentru camerele dedicate aplicatiilor industriale si stiintifice este
absolut necesar ca achizitia sa fie precedata de o atenta analiza a caracteristicilor
oferite de producator in foaia de catalog, pentru camerele de video conferinta este
preferabil sa se testeze direct calitatea produsului. Aceasta maniera de testare este
sustinuta de faptul ca imaginile din astfel de aplicatii sunt destinate in special
vederii umane. In plus veti constata ca foile de catalog ale acestor camera ofera
mult mai putine informatii decat acelea prezentate mai sus pentru camerele
dedicate aplicatiilor industriale si stiintifice. Revistele de specialitate, de exemplu
Advanced Imaging, ne ofera sfaturi utile pentru a aprecia calitatea unei camere
multimedia
Daca vizitati o expozitie sau un magazin de prezentare pentru a alege o
camera de luat vederi pentru internet (webcam) sau video conferinte trebuie sa
aveti in vedere urmatoarele eventuale trucuri la care apeleaza prezentatorii de astfel
de echipamente:
Comerciantii folosesc simulatoare de linie telefonica sau conexiuni directe.
Cereti sa va conectati la un numar real si intrebati cum se vede acolo imaginea.
Daca se face transmisie in dublu sens, verificati ca ceea ce vedeti este preluat
la celalalt capat cu exact aceeasi camera si nu cu una mult mai buna. E preferabil sa
vedeti ambele imagini.
Vi se prezinta conditii de studio: lumini perfect plasate, scena si persoane
imbracate in conditii ideale, persoanele sunt instruite sa nu se miste rapid. Rugati
persoana de la celalalt capat sa modifice aleator si repetat orientarea camerei si sa
bata din palme.
Vi se prezinta conditii perfecte si fixe: lumina, focalizarea, fondul, pozitia
camerei. Daca aveti doi-trei metrii de cablu, deplasati camera, schimbati pozitia,
astfel incat scena sa numai fie perfecta ca iluminare si fond, refocalizati singur.
Activati microfonul care a fost dezactivat sub motivul ca este prea mult
zgomot. S-ar putea sa apara zgomot pe imagine.
Camera poate fi conectata la un calculator mult mai performant decat acela
pe care urmeaza sa-l folositi dumneavoastra. Daca e posibil solicitati conectarea la
alt sistem de calcul si verificati influenta calculatorului propriu-zis si a monitorului.
Sunt utile si usor de realizat teste cum sunt cele de mai jos:
Focalizati pe fata unei persoane. Verificati culoarea si detaliile fetei, buzelor
si ale ochilor. Verificati daca puteti citi pe buze ceea ce spune persoana.
Miscati capul, intai incet si ulterior din ce in ce mai rapid. Verificati daca
pragul de la care se degradeaza imaginea este acceptabil pentru aplicatia avuta in
vedere
Acelasi lucru pentru miscarea palmelor si a degetelor. Daca ati exersat
anterior puteti avea o masura reala a numarului de cadre pe secunda si a
performantelor compresiei.
Priviti culorile in zona muchiilor din imaginea fetei; trebuie sa fie nuante
clare, fara curcubee sau denaturari. Aduceti o mira de test pentru culori si puneti-o
in fata camerei. O culoare dificila este purpuriul. Un test dur este un curcubeu de
culori. Intr-o iluminare rosiatica sau galbena, camerele ar trebui sa aiba probleme.
Daca nu, atunci cineva a trucat cumva achizitia sau afisarea.
Puneti o foaie alba de hartie in fata camerei, in lumina putina. Ar trebui sa nu fie zgomot aleator sau fix. Luati rapid foaia. Cum reactioneaza autoreglajele, cat de repede, ce fenomene tranzitorii apar? Puneti foaia in fata camerei astfel incat sa se vada muchia. Deplasati si rotiti foaia. Ce se intampla in zona muchiei? Puneti foaia in fata caemerie. Departati si apropiati foaia. Ramane culoarea uniforma?
Puneti camera in contralumina puternica Functioneaza autoreglajul expunerii? Chiar daca apar efecte nedorite puteti folosi camera in conditii controlate.
6 Lentile si camere
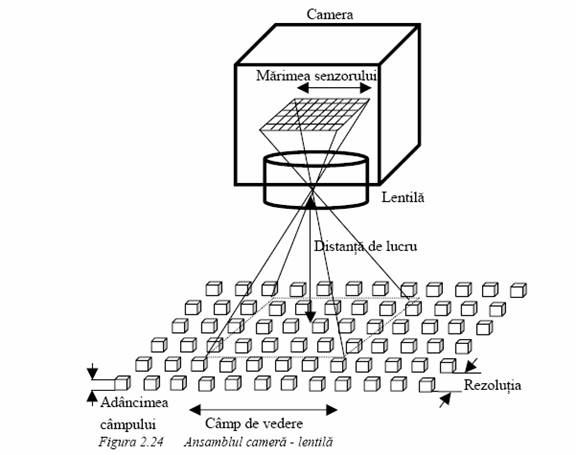
In general, camerele de luat vederi se livreaza fara lentile [ 75][206][207] (obiective). Se pleaca de la ideea ca alegerea lentilelor se face de catre utilizator in functie de aplicatia avuta in vedere si considerand in principal marimea obiectelor din scena, distanta la care se afla acestea in raport cu camera si rezolutia ceruta de aplicatie. Totusi, de multe ori, proiectantul unei aplicatii va alege in acelasi timp si lentilele si camerele de care are nevoie intr-o aplicatie. Pentru a face o astfel de alegere (figura 24) se folosesc urmatoarele notiuni:
Campul de vedere (FOV - Field of View) este zona din scena cu obiecte care
este "vazuta" de camera si eventual va fi vizualizata, de exemplu pe monitor.
Rezolutia este o masura a capacitatii de reprezentarea a detaliilor obiectelor din imagine.
Contrastul este dat de diferenta dintre nivelele de gri care corespund obiectului si respectiv fondului imaginii.
Distantele de lucru minima si maxima sunt masurate de la lentila obiectivului la obiect.
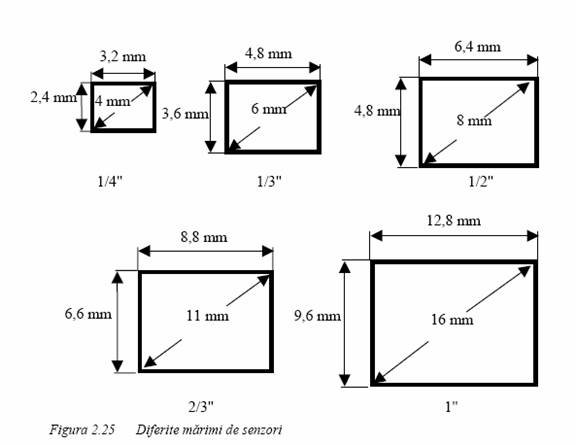
Adancimea campului (DOF - Depth of Field) este diferenta dintre cea mai apropiata si cea mai departata pozitii intre care poate fi deplasat un obiect fara ca imaginea sa se deterioreze inacceptabil (se observa blur). Adancimea campului este distanta maxima pentru care se poate asigura focalizarea perfecta cu ajutorul lentilelor. Acest parametru capata sens in asociere cu specificarea rezolutiei si contrastului. DOF poate fi crescut prin inchiderea diafragmei lentilei insotita de o crestere corespunzatoare a iluminarii. Marimea senzorului este dimensiunea zonei active a senzorului, care este de cele mai multe ori specificata prin dimensiunea orizontala. Acest parametru este folosit in calcularea magnificarii primare cerute pentru obtinerea unui anumit camp de vedere. Cele mai multe variante comercializate (figura 25) au un senzor cu raportul dintre dimensiunile verticala si orizontala in raportul 3/4.
Magnificarea primara este definita ca raportul dintre marimea senzorului si marimea campului de vedere. Acest parametru este reglat prin intermediul sistemului de lentile.
Magnificarea secundara este raportul dintre marimea monitorului si marimea senzorului.
Magnificarea sistemului este magnificarea totala realizata de sistem in totalitatea sa si este produsul dintre magnificarea primara si magnificarea secundara
Numarul de linii pe milimetru este o masura a rezolutiei in sensul ca masoara perechile de linii pe milimetru care inca apar distinct (separate) in imagine. In acest fel rezolutia poate fi exprimata ca o frecventa. Legatura cu rezolutia devine mai evidenta daca remarcam ca inversul acestui parametru este distanta minima, in milimetrii, care trebuie sa separe doua regiuni din imagine pentru ca acestea sa apara distincte. Specificarea poate fi facuta atat pentru lentile cat si pentru camere. Numarul de pixeli este un parametru care influenteaza decisiv rezolutia oferita de camera care include senzorul. Este evident ca distanta minima amintita mai sus trebuie sa corespunda cel putin la un pixel. Numarul de linii TV masoara rezolutia folosind o mira formata din linii echidistante. Daca mira acopera campul de vedere, atunci numarul de linii TV este calculat numarand liniile si spatiile distinct vizibile in imagine. Parametrul nu are unitati de masura si nu trebuie comparat cu numarul de linii pe milimetru.
Numarul F este o masura a volumului de lumina care trece prin lentila. Numarul F creste pe masura ce deschiderea diafragmei scade (diafragma se inchide). Inchizand diafragma se produce o marire a adancimii campului de vedere, dar acest lucru se poate compensa crescand iluminarea campului de vedere. Numarul f este definit ca raportul dintre distanta focala si diametrul deschiderii circulare a diafragmei. Valorile standardizate sunt 6. Valorile sunt in progresie geometrica cu ratia Fiecare avasare pe aceasta scara corespunde reducerii la jumatate a suprafetei (care depinde patratic de raza) deschiderii diafragmei si deci in aceeasi masura a volumului luminii care trece prin lentila
Pentru alegerea unei lentile [ ] pentru o camera, solutia cea mai simpla este sa se foloseasca numai ecuatia clasica a lentilelor:
unde v este distanta de la lentila la imagine, u este distanta de la lentila la obiect, f
este distanta focala
Notand factorul de marire sau de magnificare cu M, avem:
Daca se cunoaste factorul de magnificare si distanta pana la obiect se poate calcula distanta focala necesara. De exemplu, pentru un obiect de 0 centimetri si un senzor matriceal de 8,8 x 6,6 mm, pentru o distanta de 0,5 metri factorul de magnificare va fi:
M = 8,8 /
iar lungimea focala ceruta este:
f = 500 x 0,088 / mm (
Se va prefera o usoara pierdere de rezolutie pentru acoperirea unei zone mai intinse si se va alege o lentila cu lungimea focala mai mica, de 35 mm de exemplu. Pentru a lua in calcul si rezolutia si acuratetea de masurare asteptate, se pot calcula urmatoarele marimi:
Rezolutia camerei
Rezolutia camerei [ m] =
00 / Numarul de linii [perechi de linii/mm] (
Rezolutia analogica
Rezolutia orizontala [perechi de linii/mm] =
(Numarul de linii TV pe orizontala x ) / (2 x Dimensiunea orizontala a
senzorului [mm]) (
Rezolutia verticala [perechi de linii/mm] =
(Numarul de linii TV pe verticala) / (2 x Dimensiunea verticala a senzorului
[mm]) (
Este evident ca .33" provine de la raportul 3/4 care trebuie luat in calcul
pentru ca spatierea difera astfel pe cele doua directii.
Rezolutia numerica
Rezolutia camerei [perechi de linii/mm] =
Numarul de pixeli / (2 x Marimea senzorului) (
Rezolutia camerei [ m] =
2 x Marimea pixelului [ m] (
Magnificarea
Magnificarea primara PMAG =
Marimea senzorului pe orizontala [mm] / Marimea campului de vedere pe
orizontala [mm] (
Magnificarea sistemului =
PMAG x (Marimea diagonalei monitorului [mm] / Marimea diagonalei
senzorului [mm]) (
Rezolutia sistemului
Rezolutia sistemului [ m] = Rezolutia camerei [ m] / PMAG (
Rezolutia sistemului [perechi de linii/mm] =
Rezolutia camerei [perechi de linii/mm] x PMAG (20)
Sa presupunem ca se doreste masurarea un detaliu de aproximativ 3 mm dintr-o componenta mecanica cu o precizie de 25 m. Consideram ca imaginea preluata de camera de luat vederi, cuplata la un sistem de achizitie si prelucrare de imagini, este in final afisata pe un monitor. Imaginea finala afisata nu poate depasi in calitate parametrii celei mai putin performante componente din sistem. Daca aplicatia este o aplicatie de vedere artificiala cu prelucrarea automata a imaginii, atunci imaginea afisata nu va influenta rezultatul final. In acest caz calitatea monitorului nu mai este critica. Daca se face doar preluarea imaginii de la camera si afisarea ei pe monitor atunci calitatea monitorului va influenta evident rezolutia sistemului. Este necesar sa fie cunoscute valorile parametrilor care definesc aplicatia si calculate marimile prezentate mai sus. Pe baza acestor informatii se poate face o alegere a componentelor sistemului. Trebuie luate in calcul si conditiile de iluminare care influenteaza decisiv performantele globale ale sistemului. Acolo unde este posibil, stabilirea unor conditii de iluminare controlate si constante (de exemplu in aplicatii industriale de fabricatie integrata) pot asigura o baza solida pentru dezvoltarea unei aplicatii performante. In aplicatiile in care conditiile de iluminare nu sunt controlabile si/sau sunt variabile, efortul de eliminare a influentelor care apar ca o consecinta va fi considerabil. rezolutia imaginii afisate pe monitor. Alegem un camp de vedere de 4,75 mm pe orizontala pentru ca partea utila sa ocupe cea mai mare parte a imaginii afisate pe monitor. Dintre formaatele CCD disponibile presupunem ca vom folosi o camera de mm pe orizontala). Pentru ca, asa cum am precizat deja, dorim sa umplem imaginea de pe monitor cu imaginea corespunzatoare campului de vedere, cu cat alegem un senzor de dimensiune mai mare cu atat vom avea nevoie de lentile cu magnificare mai mare. Acum se poate calcula magnificarea primara, magnificarea secundara (sa presupunem un monitor cu diagonala de si magnificarea sistemului. Cum magnificarea sistemului corespunde magnificarii lentilelor, se va folosi aceasta valoare pentru a alege un obiectiv adecvat. Este de preferat un obiectiv care sa permita si un zoom (marirea campului de vedere) out pentru a avea posibilitatea sa vizualizam o portiune mai mare din obiectul care contine detaliul care ne intereseaza
|
Politica de confidentialitate |
| Copyright ©
2025 - Toate drepturile rezervate. Toate documentele au caracter informativ cu scop educational. |
Personaje din literatura |
| Baltagul caracterizarea personajelor |
| Caracterizare Alexandru Lapusneanul |
| Caracterizarea lui Gavilescu |
| Caracterizarea personajelor negative din basmul |
Tehnica si mecanica |
| Cuplaje - definitii. notatii. exemple. repere istorice. |
| Actionare macara |
| Reprezentarea si cotarea filetelor |
Geografie |
| Turismul pe terra |
| Vulcanii Și mediul |
| Padurile pe terra si industrializarea lemnului |
| Termeni si conditii |
| Contact |
| Creeaza si tu |
